
Intermittent Nvargus Crashes with Jetson Orin Nano and ZED X Camera
Issue Overview
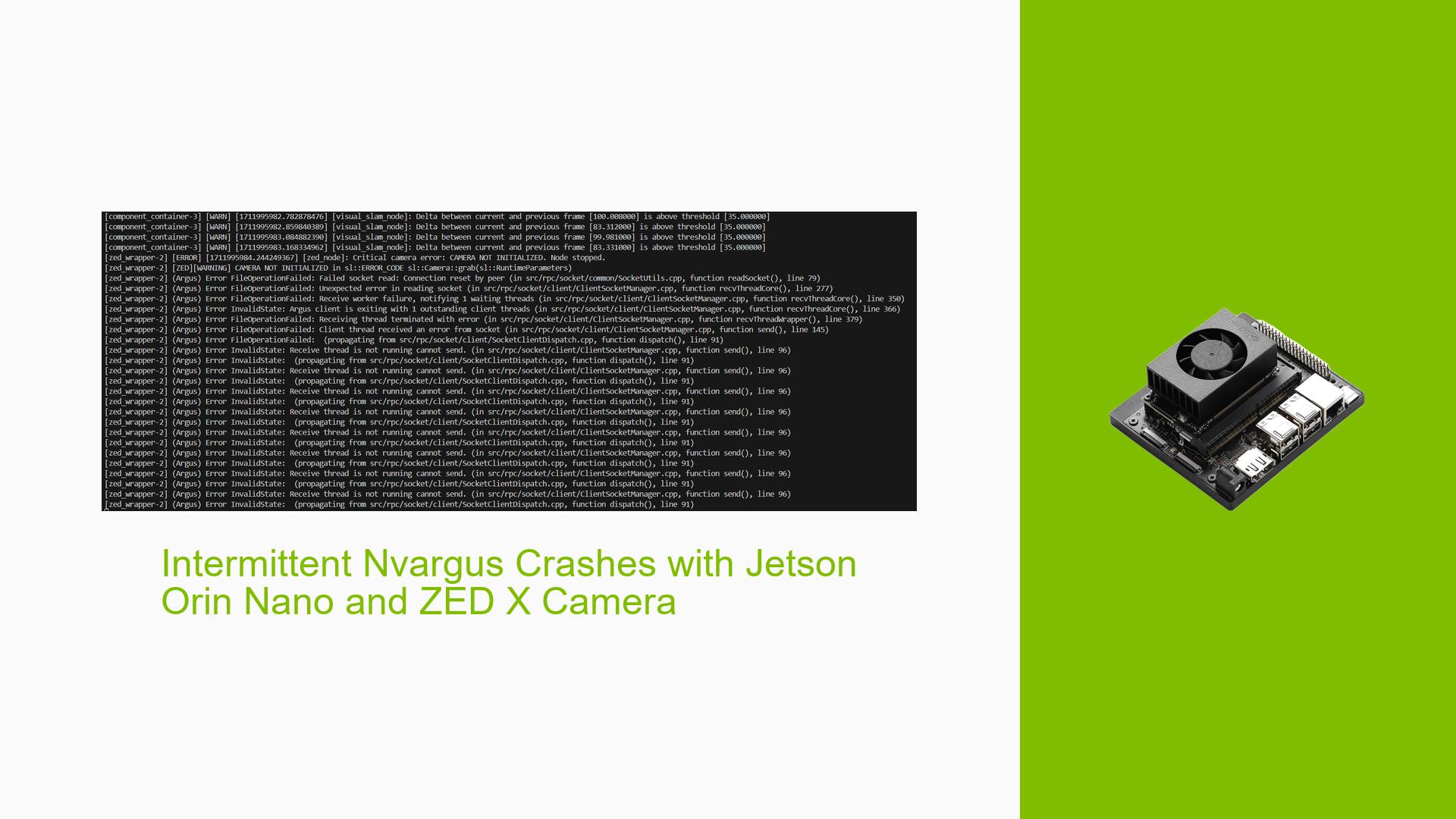
Users are experiencing intermittent crashes of the Nvargus service when using the Jetson Orin Nano with a ZED X camera. The issue occurs while running the Isaac ROS VSLAM node for the ZED camera suite. The problem manifests as follows:
- The ROS node initially reports that the ZED camera has not been initialized.
- The Argus service crashes unexpectedly.
- The crash can happen anywhere from 20 minutes to 4 hours after starting the system.
- Prior to the crash, the camera is streaming and reporting its position live.
- The Nvargus service fails when trying to restart the camera.
- The ZED service appears to be functioning normally.
This issue significantly impacts the reliability and usability of the system for computer vision and SLAM applications.
Possible Causes
-
Software compatibility issues: The Jetson Orin Nano’s software stack may not be fully compatible with the ZED X camera or the Isaac ROS VSLAM node.
-
Driver conflicts: There could be conflicts between the Nvargus driver and the ZED camera drivers.
-
Resource exhaustion: The system may be running out of memory or other resources over time, leading to the crash.
-
Thermal issues: The Jetson Orin Nano might be overheating during extended operation, causing instability.
-
Power supply problems: Insufficient or unstable power supply could lead to intermittent crashes.
-
Firmware or software bugs: There may be bugs in the Nvargus service, ZED camera firmware, or Isaac ROS VSLAM node.
-
Hardware defects: The Jetson Orin Nano or ZED X camera could have hardware issues causing intermittent failures.
Troubleshooting Steps, Solutions & Fixes
-
Update all software components:
- Ensure the Jetson Orin Nano is running the latest JetPack version.
- Update the ZED SDK to the latest version compatible with your setup.
- Update the Isaac ROS VSLAM node to the most recent release.
-
Check system logs:
- Analyze the dmesg.log file for any relevant error messages or warnings.
- Monitor system resources using commands like
toporhtopto identify potential resource exhaustion.
-
Thermal management:
- Monitor the system temperature using the command:
tegrastats - Ensure proper ventilation and consider adding additional cooling if necessary.
- Monitor the system temperature using the command:
-
Power supply verification:
- Check that the power supply meets the requirements for both the Jetson Orin Nano and the ZED X camera.
- Use a multimeter to verify stable voltage output.
-
Isolate the issue:
- Test the ZED X camera with a simple video streaming application to determine if the problem is specific to the Isaac ROS VSLAM node.
- Try running the system with a different camera to see if the issue is specific to the ZED X.
-
Nvargus service investigation:
- Check the Nvargus service logs for more detailed error information:
journalctl -u nvargus-daemon - Try reinstalling the Nvargus service:
sudo apt-get install --reinstall nvidia-l4t-core
- Check the Nvargus service logs for more detailed error information:
-
ZED SDK troubleshooting:
- Run the ZED SDK samples to test basic camera functionality.
- Check the ZED SDK logs for any error messages or warnings.
-
Contact support:
- Reach out to NVIDIA developer support with the collected logs and system information.
- Consult with Stereolabs (ZED camera manufacturer) for specific guidance on the ZED X camera integration.
-
Implement a watchdog:
- Create a script that monitors the Nvargus service and automatically restarts it if a crash is detected.
-
Kernel parameter adjustment:
- Try adding the kernel parameter
nvargus_disable=1to the boot command line to disable Nvargus and use V4L2 instead.
- Try adding the kernel parameter
-
Memory management:
- Monitor memory usage and consider increasing swap space if memory pressure is observed.
-
Driver rollback:
- If the issue started after a recent update, try rolling back to a previous known-good version of the Nvargus driver or ZED SDK.
Remember to document any changes made during troubleshooting and their effects on system stability. If the issue persists after trying these steps, consider opening a support ticket with NVIDIA and providing all collected logs and system information for further assistance.