
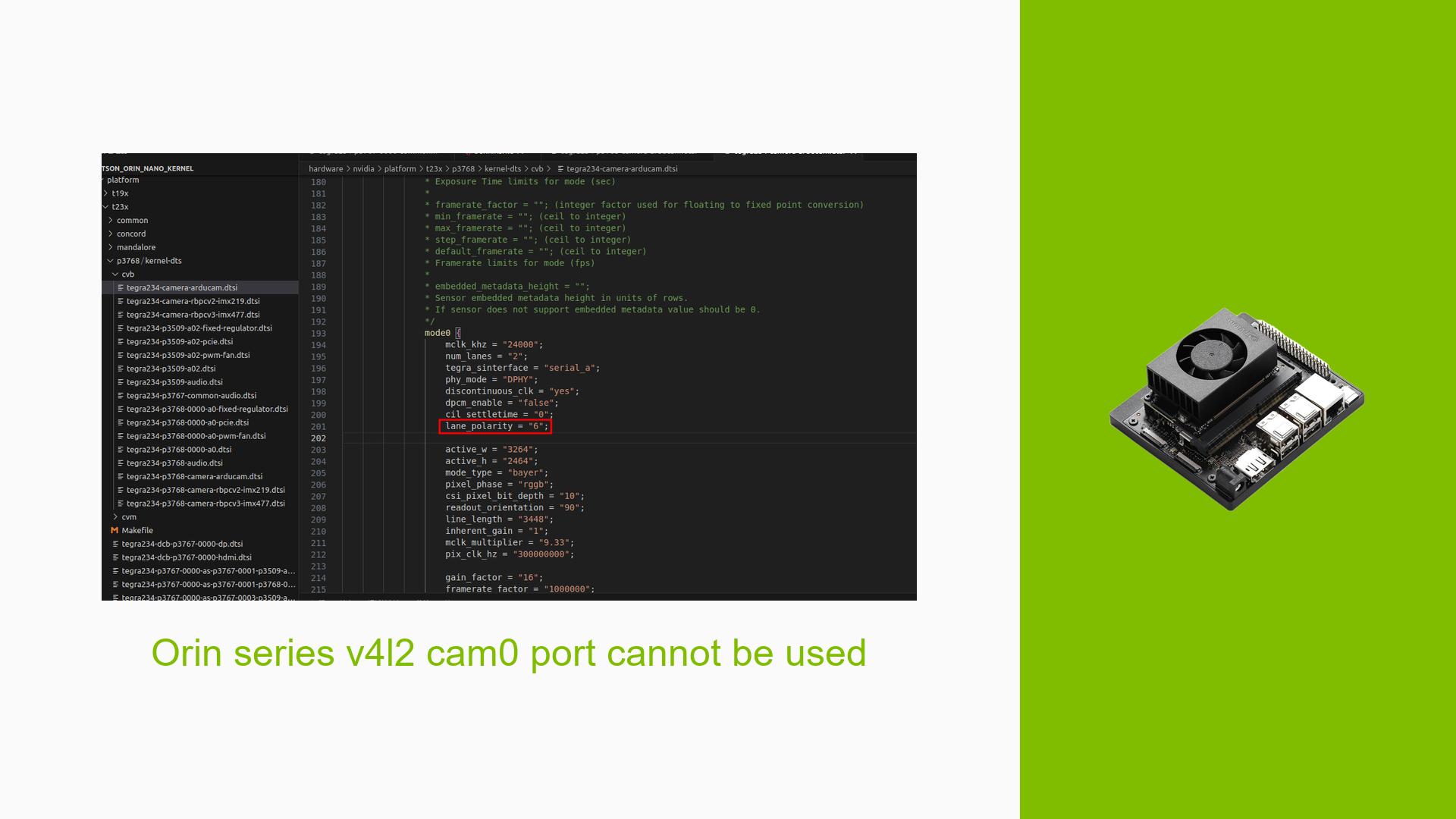
Orin series v4l2 cam0 port cannot be used
Issue Overview
The discussion centers around a problem encountered by developers using the Nvidia Jetson Orin Nano and Orin NX development kits while attempting to interface with a camera module through the V4L2 (Video for Linux 2) framework. Users report that they are unable to access data from the cam0 port, despite successful configurations in other frameworks like the Nvidia ISP (Image Signal Processor) framework.
Symptoms and Context
-
Symptoms: Users are unable to retrieve data from the cam0 interface using V4L2, even after setting the
lane_polarityparameter in the device tree. The commandv4l2-ctlfails to fetch data, and no output is generated when trying to access the camera stream. -
Context: The issue arises when users attempt to configure camera settings directly through V4L2 while using Jetpack 5.1.2 and L4T 35.4.1 on official Nvidia development kits.
Hardware and Software Specifications
-
Hardware: Nvidia Jetson Orin Nano and Orin NX development kits.
-
Software: Jetpack 5.1.2 / L4T 35.4.1.
Frequency and Impact
-
Frequency: The issue appears consistently among multiple users who have attempted similar configurations.
-
Impact: This problem significantly hinders the ability to utilize the camera functionality on these development boards, affecting development timelines and project outcomes.
Possible Causes
-
Hardware Incompatibilities or Defects: There may be issues related to specific camera models or compatibility with the Orin series hardware.
-
Software Bugs or Conflicts: Potential bugs in the V4L2 implementation or conflicts between different software components may prevent proper camera access.
-
Configuration Errors: Incorrect settings in the device tree or misconfigured parameters could lead to failures in accessing cam0.
-
Driver Issues: Outdated or incorrect drivers may cause communication problems between the camera and the V4L2 framework.
-
Environmental Factors: Power supply issues or thermal conditions could affect hardware performance.
-
User Errors or Misconfigurations: Mistakes in setting up the device tree or using incorrect commands can lead to failures.
Troubleshooting Steps, Solutions & Fixes
Step-by-Step Instructions for Diagnosis
-
Verify Device Node Access:
- Ensure you are accessing the correct video node. Use:
ls /dev/video* - Check if
/dev/video0corresponds to your intended sensor ID.
- Ensure you are accessing the correct video node. Use:
-
Check Lane Polarity Configuration:
- Confirm that
lane_polarityis set correctly in your device tree. - Example configuration:
lane_polarity = "6"; // Adjust as necessary
- Confirm that
-
Inspect Sensor Pixel Clock Settings:
- Review the pixel clock settings as incorrect configurations can lead to issues.
- Refer to documentation related to sensor pixel clock parameters.
-
Use Debugging Tools:
- Enable debugging logs for further insights:
echo 1 > /sys/kernel/debug/tracing/tracing_on echo 30720 > /sys/kernel/debug/tracing/buffer_size_kb echo 1 > /sys/kernel/debug/tracing/events/tegra_rtcpu/enable echo 1 > /sys/kernel/debug/tracing/events/freertos/enable echo 2 > /sys/kernel/debug/camrtc/log-level echo 1 > /sys/kernel/debug/tracing/events/camera_common/enable echo > /sys/kernel/debug/tracing/trace
- Enable debugging logs for further insights:
-
Test Different Configurations:
- Experiment with different values for
lane_polarity, such as:lane_polarity = "4"; // For testing purposes
- Experiment with different values for
-
Use Alternative Commands for Testing:
- Try fetching data using
v4l2-ctlwith specific parameters:v4l2-ctl --set-fmt-video=width=1920,height=1080,pixelformat='RG10' --stream-mmap --stream-count=-1 --set-ctrl=sensor_mode=2 --set-ctrl=bypass_mode=0
- Try fetching data using
-
Review Device Tree Settings:
- Compare your device tree settings with those known to work on other Jetson devices (e.g., Jetson Nano, Xavier NX).
Recommended Solutions
-
If you successfully receive data using
nvarguscamerasrc, but not via V4L2, ensure that both methods are targeting the same video node. -
Consider updating your Jetpack version if you suspect software bugs or incompatibilities.
Best Practices for Future Prevention
-
Regularly check for firmware updates and driver patches from Nvidia.
-
Maintain a backup of working configurations for quick recovery during troubleshooting.
Unresolved Aspects
While several troubleshooting steps have been suggested, some users still report persistent issues with accessing cam0, indicating that further investigation may be needed into specific hardware compatibility or deeper software conflicts within the V4L2 framework.