
Orin Nano: MIPI acquisition reports CHANSEL_NOMATCH
Issue Overview
Users are experiencing the CHANSEL_NOMATCH error while attempting to acquire images from an IMX297 MIPI sensor connected to the Jetson Orin Nano via the CSI3 port. The symptoms include:
- Successful camera configuration over I2C and streaming initiation.
- Error messages during acquisition attempts, specifically when using the command
v4l2-ctl --stream-mmap --stream-count=1 --stream-to=frame.raw, which results in multiple CHANSEL_NOMATCH notifications in the logs. - Kernel logs indicating frame discards due to correlation errors, suggesting that frames are being incorrectly processed or not matching expected formats.
The issue appears to be consistent and reproducible, impacting the user experience by preventing successful image capture and processing. Users suspect a device tree configuration problem or a potential bug in the driver or Jetpack version being used.
Possible Causes
- Hardware Incompatibilities: The IMX297 sensor may not be fully compatible with the Orin Nano’s CSI interface, leading to mismatches in expected data formats.
- Software Bugs: There may be unresolved bugs in the custom driver or in the Jetpack version (L4T 35.3.1) being used, particularly regarding camera handling.
- Configuration Errors: Incorrect settings in the device tree or camera configuration (e.g., active_h settings) can lead to mismatches in expected data streams.
- Driver Issues: The use of a custom driver may introduce unforeseen issues that are not present in standard configurations.
- Environmental Factors: Power supply issues or thermal conditions could affect the performance of the sensor and its ability to transmit data correctly.
- User Errors: Misconfigurations during setup or incorrect command usage could also lead to these errors.
Troubleshooting Steps, Solutions & Fixes
-
Update Jetpack:
- Upgrade to the latest Jetpack version (e.g., Jetpack 5.1.2 / L4T 35.4.1) as it includes fixes for known camera bugs.
- Use the SDK Manager to perform this update.
-
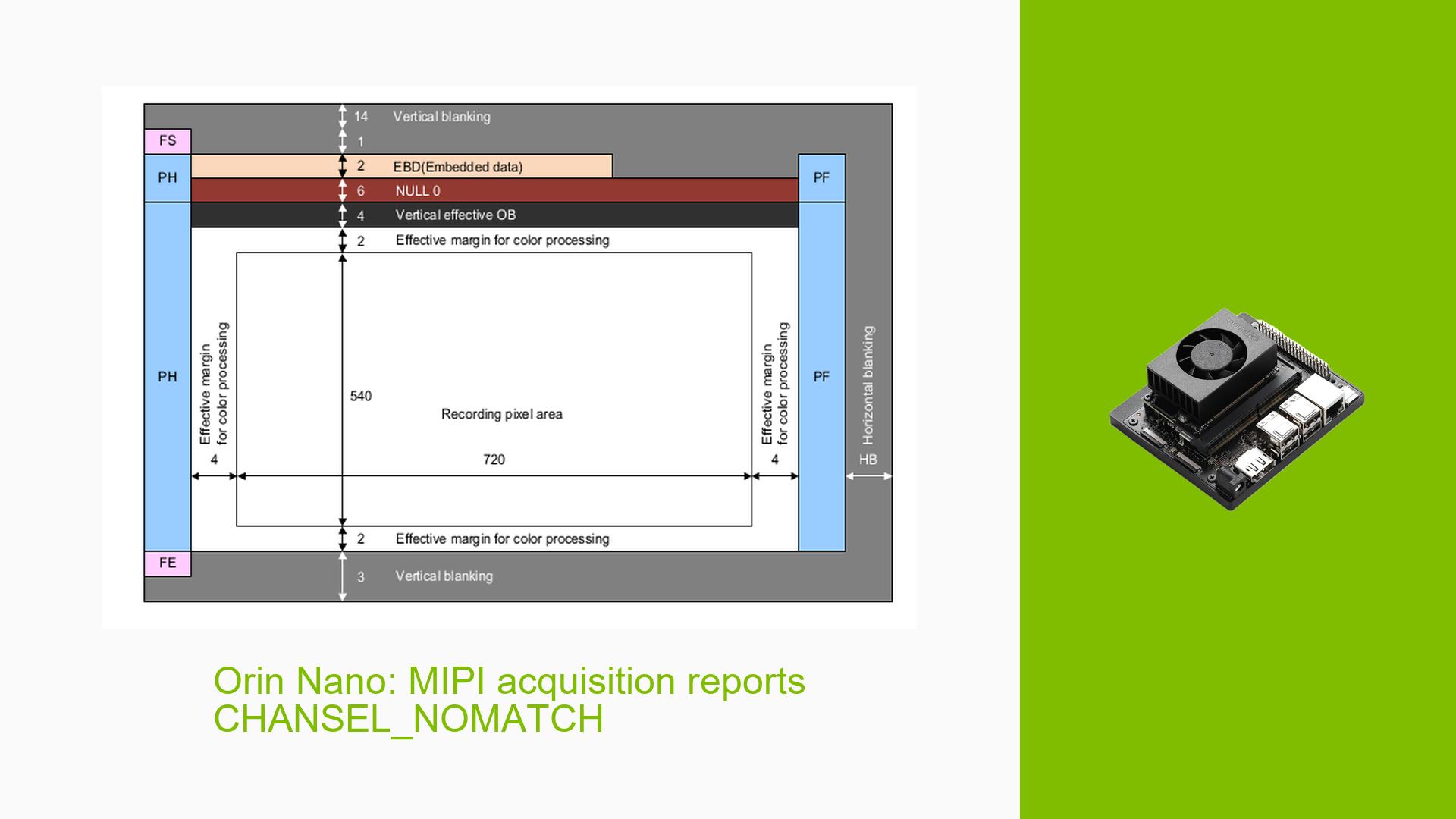
Check Device Tree Configuration:
- Review and validate the device tree settings for any discrepancies related to line length and active_h configurations.
- Ensure that
active_his set correctly according to your sensor specifications (540 lines).
-
Test with Different Line Lengths:
- Experiment with different line lengths for your sensor output (e.g., 704px instead of 720px) and set
preferred_strideaccordingly using:v4l2-ctl -c preferred_stride=1472 - This adjustment might resolve alignment issues causing frame drops.
- Experiment with different line lengths for your sensor output (e.g., 704px instead of 720px) and set
-
Apply Patches:
- If applicable, consider applying patches that have been reported to resolve similar issues, such as disabling buffer requeuing in certain driver files.
-
Reset Signal Before Streaming:
- Implement a reset signal in your driver before calling
s_stream. This can help align the sensor with the video input capture engine. - Example code snippet for resetting (if applicable):
static imx219_reg imx219_start_stream[] = { {0x0103, 0x01}, // Software reset {IMX219_TABLE_WAIT_MS, 10}, {0x0100, 0x01}, // Start streaming {IMX219_TABLE_WAIT_MS, 3}, };
- Implement a reset signal in your driver before calling
-
Review Kernel Logs:
- Continuously monitor kernel logs for further insights into errors during capture attempts:
dmesg | grep tegra-camrtc-capture-vi
- Continuously monitor kernel logs for further insights into errors during capture attempts:
-
Seek Community Assistance:
- Engage with community forums for additional insights or similar experiences from other users who may have resolved this issue.
-
Documentation and Resources:
- Refer to NVIDIA’s TRM (Technical Reference Manual) for specific requirements regarding video input alignment and configuration settings.
By following these troubleshooting steps and solutions, users should be able to diagnose and potentially resolve the CHANSEL_NOMATCH error encountered with their Jetson Orin Nano setup. Further investigation may be needed if issues persist after applying these recommendations.