
Orin Nano 4lane MIPI-CSI-2 CLK
Issue Overview
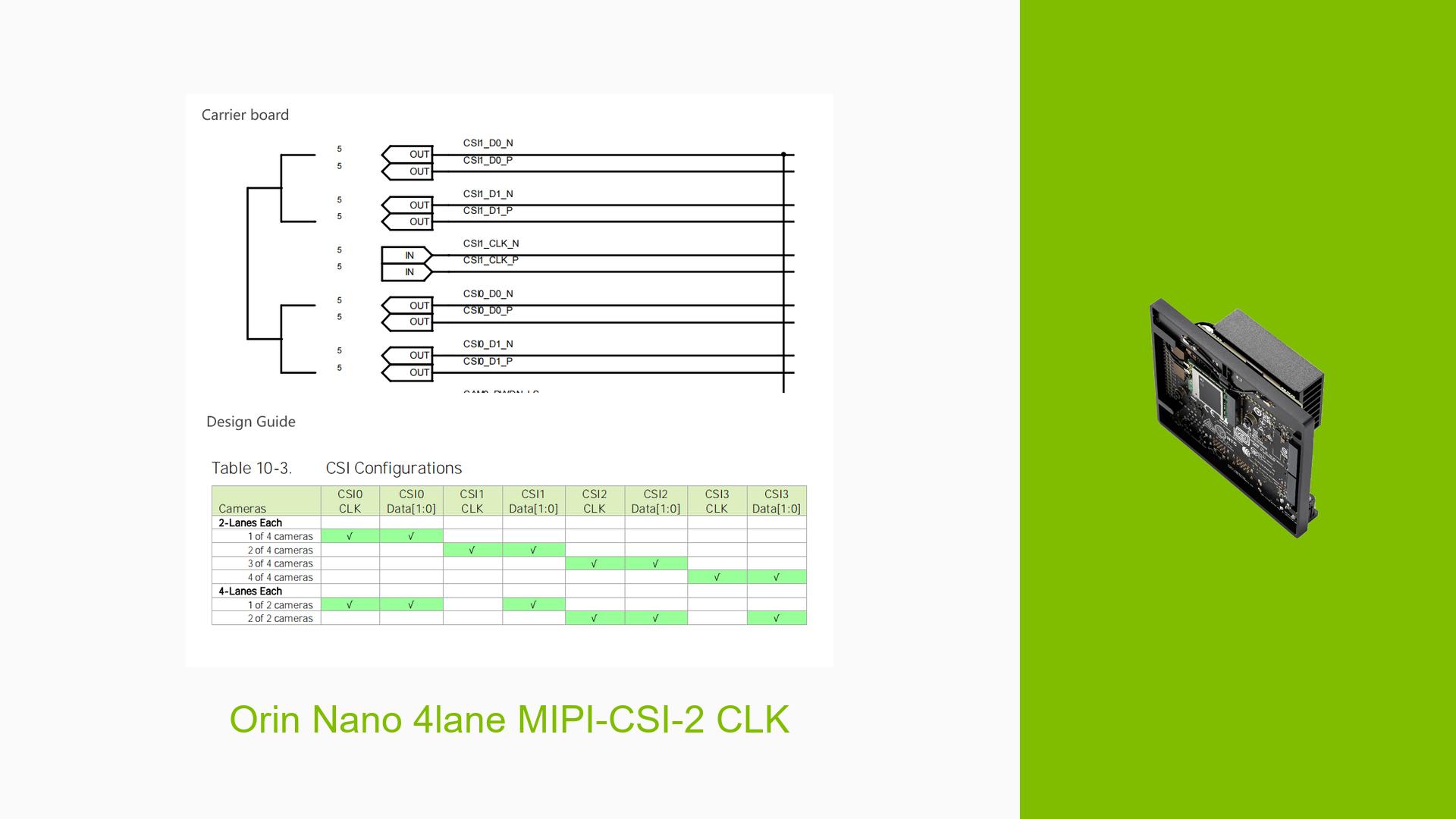
The issue discussed involves the integration of a 4-lane MIPI-CSI-2 camera with the Jetson Orin Nano Developer Kit. Users have reported confusion regarding the design differences between the Jetson Orin NX Carrier Board and the specifications outlined in the product design guide. Specifically, users noted that while the design guide suggests that the CSI1 clock is not utilized, it is indeed used in the Jetson Orin NX Carrier Board configuration. This discrepancy has led to difficulties in designing compatible hardware setups for camera integration.
Symptoms and Context:
- Users are experiencing uncertainty about how to correctly configure their hardware for camera use.
- The problem arises during the design phase of integrating a 4-lane MIPI-CSI-2 camera.
- Relevant hardware includes the Jetson Orin Nano Developer Kit and its associated carrier board.
Frequency and Impact:
- The issue appears to be consistent among users attempting to utilize this specific camera configuration, impacting their ability to proceed with development.
Possible Causes
-
Hardware Incompatibilities:
- The discrepancy between the design guide and actual board specifications may lead to incorrect assumptions about necessary connections, resulting in malfunctioning setups.
-
Design Guide Confusion:
- Lack of clarity in documentation regarding which clock signals are utilized can lead to misconfigurations.
-
Configuration Errors:
- Incorrect wiring or configuration settings based on outdated or incomplete information could result in non-functional camera integration.
Troubleshooting Steps, Solutions & Fixes
Step-by-Step Instructions
-
Review Design Documentation:
- Ensure that you have the latest version of both the Jetson Orin Nano Developer Kit User Guide and any relevant design guides.
- Pay particular attention to sections detailing MIPI-CSI-2 configurations.
-
Check Carrier Board Specifications:
- Verify that your carrier board matches the specifications outlined for camera connections, particularly regarding clock usage.
-
Testing Configuration:
- If possible, test with a known working configuration (e.g., using a 2-lane sensor) to isolate whether the issue is specific to the 4-lane setup.
- Use a multimeter or oscilloscope to check signal integrity on the CSI lines.
-
Use Recommended Components:
- Follow suggestions from other users who have successfully integrated similar cameras; consider using components explicitly recommended by NVIDIA.
Commands and Procedures
- To check connected devices:
sudo apt update sudo apt install -y v4l-utils v4l2-ctl --list-devices
Isolation Methods
-
Test with Different Cameras:
- If available, try connecting a different MIPI camera module that is known to work with the Jetson Orin platform.
-
Firmware Updates:
- Ensure that your Jetson Orin Nano is running the latest firmware by checking NVIDIA’s documentation for updates related to JetPack and firmware versions.
Potential Fixes
- If issues persist after following these steps, consider reaching out on NVIDIA’s developer forums for additional support.
Best Practices
- Regularly consult updated documentation from NVIDIA regarding any changes or updates related to hardware configurations.
- Engage with community forums for shared experiences and solutions from other developers facing similar challenges.
Unresolved Aspects
While several users have reported success by adhering closely to the official design guides and utilizing recommended configurations, there remains ambiguity regarding specific clock signal usage that may require further clarification from NVIDIA’s technical support or community forums.