
MIPI Camera Interface Confusion on Jetson Orin Nano Dev Kit
Issue Overview
Users are experiencing confusion regarding the MIPI camera interface specifications for the Jetson Orin Nano Developer Kit. The main points of confusion are:
- The number of lanes supported by camera connectors J20 and J21.
- Discrepancies between the official documentation and user experiences.
- Voltage levels for the CAM1_PWDN pin on camera connectors.
These issues are causing uncertainty during hardware setup and integration of camera modules with the Jetson Orin Nano Dev Kit.
Possible Causes
- Documentation errors: The Jetson Orin Nano DevKit Carrier Board Specification document may contain typos or outdated information.
- Hardware limitations: The physical design of the board may impose restrictions on certain interfaces that are not clearly communicated in the documentation.
- Software constraints: Current software implementations may limit the functionality of certain hardware interfaces.
- Misinterpretation of technical specifications: Users may be misunderstanding the provided documentation due to its technical nature.
Troubleshooting Steps, Solutions & Fixes
-
Camera Connector Lane Configuration:
- J20 (CSI 1) supports only 2-lane configuration due to clock limitations.
- J21 (CSI 2) supports both 2-lane and 4-lane configurations.
Solution: When connecting cameras, ensure you use the appropriate connector based on your camera’s lane requirements. For 4-lane cameras, use J21.
-
Clock Lane Support:
- x4 camera configurations are only supported on the lower clock lanes (CSI0_CLK or CSI2_CLK).
- CSI1_CLK and CSI3_CLK do not support x4 configurations in the current software.
Fix: If you need to use a 4-lane camera, connect it to J21, which uses CSI2_CLK.
-
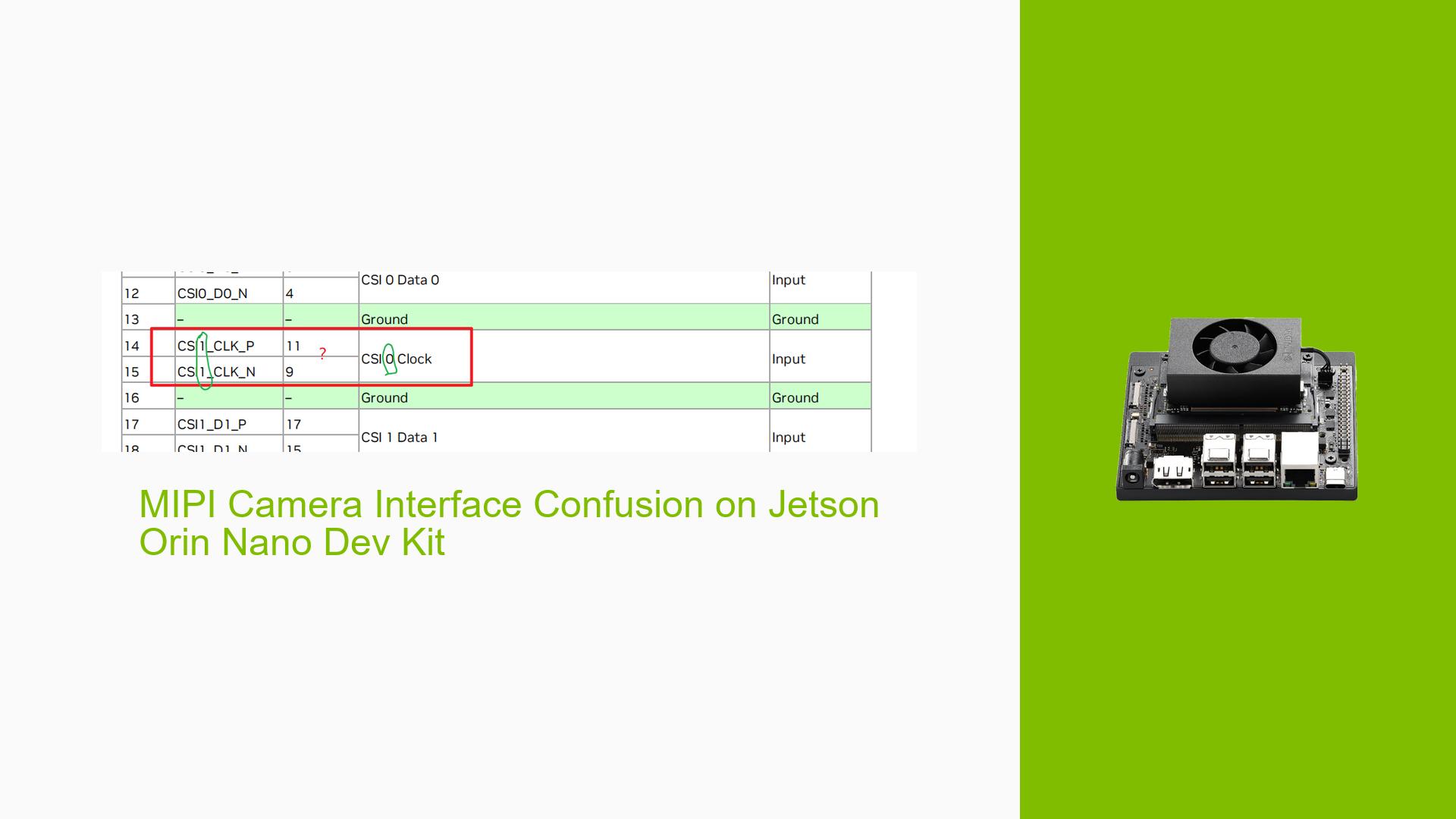
Documentation Correction:
- The specification document incorrectly labels J20’s clock as "CSI 0 Clock" on page 23.
Solution: This is a confirmed typo. The correct label should be "CSI1 Clock". Users should make a note of this correction when referring to the document.
-
USB Type-C Port Functionality:
- The USB Type-C port on the Jetson Orin Nano Dev Kit does not support video output protocols like DisplayPort (DP), HDMI, or VGA.
Workaround: For display output, use the dedicated DisplayPort (DP) connector on the board. USB Type-C can still be used for other peripherals like keyboards, mice, and Ethernet adapters.
-
CAM1_PWDN Voltage Level:
- There is confusion regarding the voltage level of the CAM1_PWDN pin due to conflicting information in different documents.
Clarification:
- The output from the module pin is 1.8V.
- The voltage level at the camera connector pin is 3.3V after passing through a buffer.
When working with camera modules:
- Design your circuits expecting a 3.3V signal at the camera connector for CAM1_PWDN.
- Be aware that the module itself operates at 1.8V for this signal before the buffer.
-
General Troubleshooting:
- Always refer to the latest documentation available on the NVIDIA Developer website.
- If you encounter discrepancies, report them to NVIDIA support for clarification.
- When integrating cameras or other peripherals, verify the electrical specifications and ensure compatibility with the Jetson Orin Nano Dev Kit.
- For software-related issues, ensure you are using the latest JetPack SDK version compatible with your hardware.
By following these guidelines and understanding the clarifications provided, users should be able to correctly configure and utilize the MIPI camera interfaces on the Jetson Orin Nano Developer Kit.