
JetPack 5.1: Encoder Pin State Detection Issue on Jetson Orin Nano Dev Board
Issue Overview
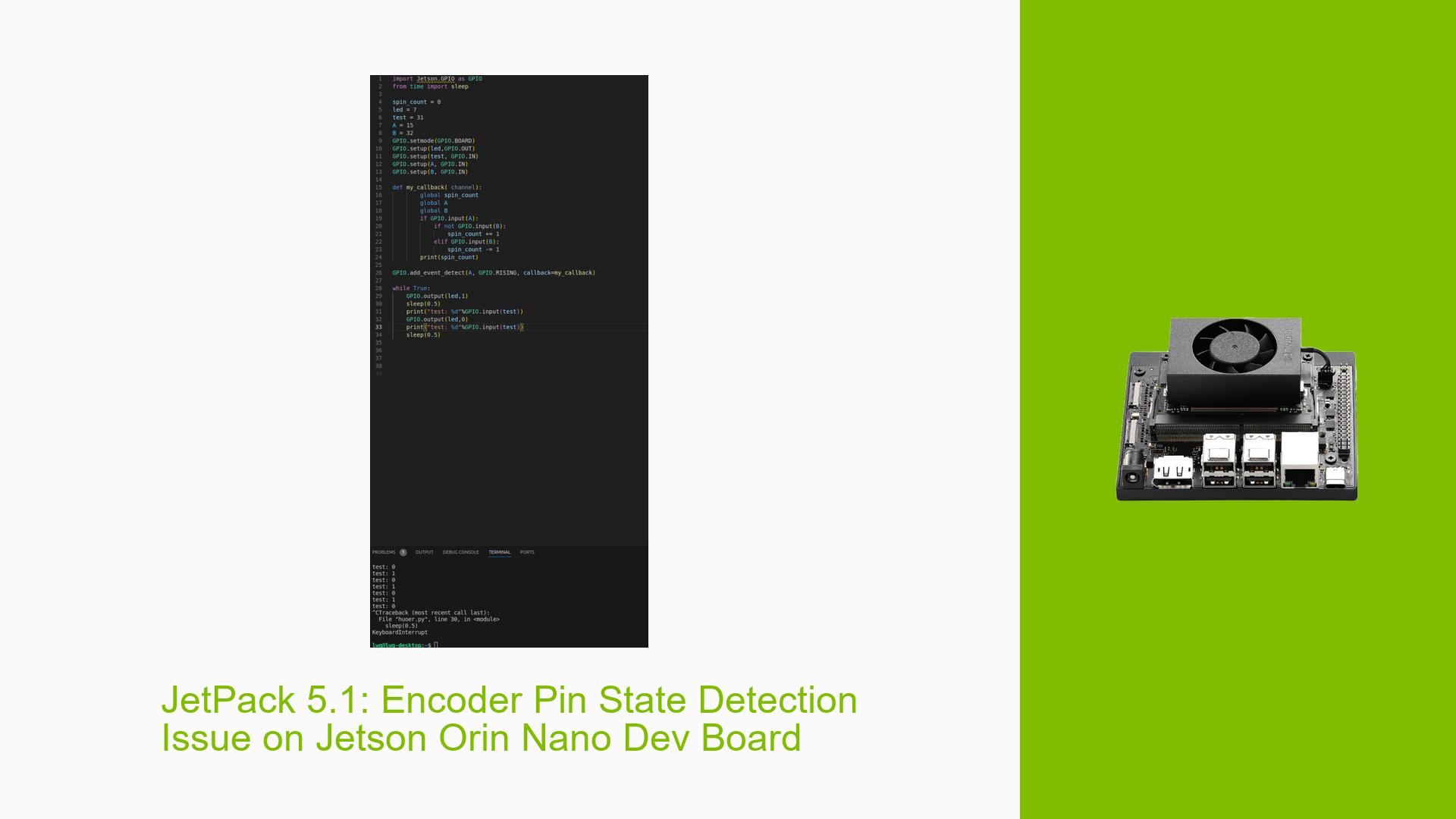
Users of the Nvidia Jetson Orin Nano Dev board running JetPack 5.1 are experiencing difficulties with encoder pin state detection. Specifically, the problem involves the inability to read changes in the high and low levels of a pin connected to the encoder’s phase A, despite proper voltage output from the encoder. This issue persists regardless of motor rotation, suggesting a potential problem with the interrupt function or pin configuration. The problem significantly impacts the ability to accurately monitor and control motor position, which is crucial for many robotics and automation applications.
Possible Causes
-
Software Version Incompatibility: The issue may be related to bugs or limitations in JetPack 5.1, which could affect the proper functioning of GPIO interrupts or pin state detection.
-
Incorrect Pin Configuration: The GPIO pin (pin 12) might not be properly configured for interrupt detection, leading to missed state changes.
-
Interrupt Handler Issues: The interrupt function may not be correctly implemented or registered, causing it to fail in detecting pin state changes.
-
Hardware Connection Problems: There could be issues with the physical connection between the encoder and the Jetson board, such as loose wires or incorrect wiring.
-
Encoder Malfunction: Although the voltage output seems correct, there might be an issue with the encoder’s signal generation or timing.
-
Power Supply Instability: Fluctuations in power supply could potentially affect the reliability of pin state detection.
-
Electromagnetic Interference: External electromagnetic noise might be interfering with the signal from the encoder to the Jetson board.
Troubleshooting Steps, Solutions & Fixes
-
Upgrade JetPack Version:
- Update to the latest JetPack version (5.1.3 or newer) as suggested by the Nvidia support team.
- Follow the official Nvidia documentation for the upgrade process.
-
Verify GPIO Configuration:
- Ensure that the GPIO pin is correctly configured for interrupt detection.
- Use the following command to check the current GPIO configuration:
sudo cat /sys/kernel/debug/gpio - If necessary, reconfigure the pin using the appropriate GPIO library for Jetson.
-
Review Interrupt Handler Code:
- Double-check the implementation of the interrupt function.
- Ensure that the interrupt is properly registered and that the handler is being called.
- Consider using a simple LED blink test to verify interrupt functionality:
import Jetson.GPIO as GPIO import time GPIO.setmode(GPIO.BOARD) GPIO.setup(12, GPIO.IN) GPIO.setup(18, GPIO.OUT) def blink_led(channel): GPIO.output(18, GPIO.HIGH) time.sleep(0.5) GPIO.output(18, GPIO.LOW) GPIO.add_event_detect(12, GPIO.BOTH, callback=blink_led) try: while True: time.sleep(1) except KeyboardInterrupt: GPIO.cleanup()
-
Check Physical Connections:
- Inspect all wiring between the encoder and the Jetson board.
- Ensure that all connections are secure and correctly mapped.
- Use a multimeter to verify continuity and proper voltage levels.
-
Test Encoder Functionality:
- Use an oscilloscope to observe the encoder’s output signals directly.
- Verify that the encoder is generating the expected square wave pattern when the motor is rotated.
-
Monitor Power Supply:
- Check the stability of the power supply using a multimeter or oscilloscope.
- Ensure that the voltage remains within the specified range for both the Jetson board and the encoder.
-
Implement Software Debouncing:
- Add software debouncing to filter out potential noise or false triggers:
import time last_trigger_time = 0 debounce_time = 0.01 # 10ms debounce def debounced_interrupt(channel): global last_trigger_time current_time = time.time() if (current_time - last_trigger_time) > debounce_time: # Process the interrupt print("Pin state changed") last_trigger_time = current_time GPIO.add_event_detect(12, GPIO.BOTH, callback=debounced_interrupt)
- Add software debouncing to filter out potential noise or false triggers:
-
Use Alternative GPIO Library:
- If issues persist, try using the
gpiodlibrary instead ofJetson.GPIO:sudo apt-get install python3-libgpiod - Implement pin monitoring using
gpiod:import gpiod import time chip = gpiod.Chip('gpiochip0') line = chip.get_line(12) line.request(consumer="test", type=gpiod.LINE_REQ_EV_BOTH_EDGES) while True: ev_line = line.event_wait(sec=1) if ev_line: event = line.event_read() print(f"Event detected: {event}") time.sleep(0.1)
- If issues persist, try using the
-
Electromagnetic Interference Mitigation:
- Use shielded cables for encoder connections.
- Ensure proper grounding of all components.
- Consider adding ferrite beads to signal lines to reduce high-frequency noise.
If the issue persists after trying these solutions, consider reaching out to Nvidia support or consulting the Jetson community forums for further assistance. Additionally, providing detailed logs and system information when seeking help can greatly facilitate troubleshooting efforts.