
V4L2 Subdev Registration and Unloading Issues on Jetson Orin Nano
Issue Overview
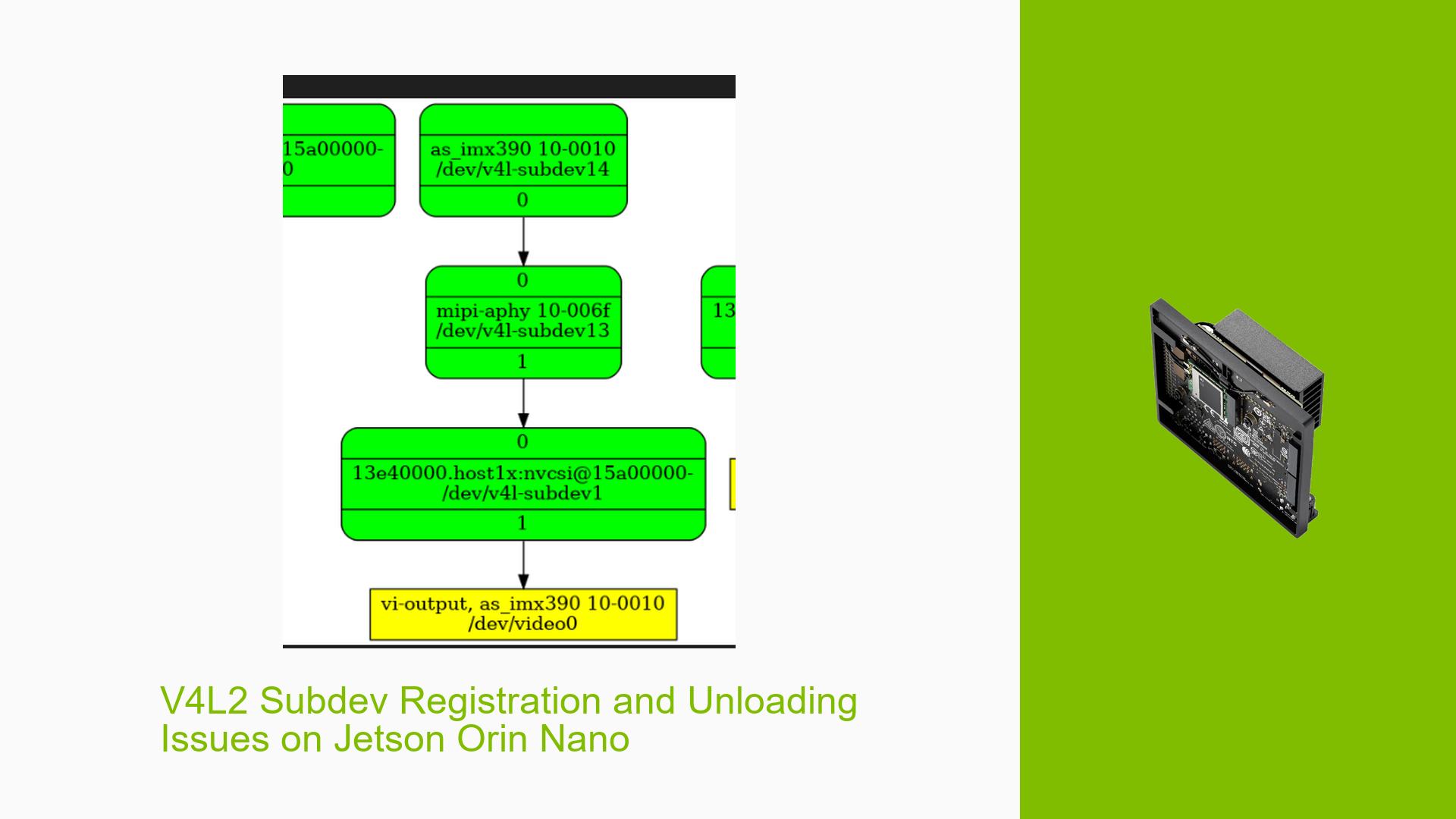
Users are experiencing difficulties with V4L2 subdevice registration and module unloading on the Nvidia Jetson Orin Nano development board. The main problems include:
- Inability to unload the module after registering a V4L2 subdevice
- Issues with setting the CSI clock frequency
- Problems with the Tegra camera pipeline binding
- Null pointer issues in the camera common data structure
These issues are occurring in the context of developing a bridge device between a camera and the Jetson board, using JetPack R35 (release 3.1) on an Orin Nano 4GB model.
Possible Causes
- Incorrect subdevice registration process
- Conflicts between standard V4L2 framework and Tegra-specific implementations
- Missing or incomplete driver operations
- Improper handling of device references or memory
- Incompatibilities between the custom bridge device and the Tegra camera pipeline
- Bugs in the JetPack R35 release for Orin Nano
Troubleshooting Steps, Solutions & Fixes
-
Correct subdevice registration:
- Ensure that the subdevice is registered using the appropriate Tegra-specific function instead of the standard V4L2 function:
// Replace ret = v4l2_async_register_subdev(&priv->sd); // With ret = tegracam_v4l2subdev_register(&priv->sd);
- Ensure that the subdevice is registered using the appropriate Tegra-specific function instead of the standard V4L2 function:
-
Implement proper unregistration:
- To allow module unloading, set the subdevice pointer to NULL after unregistering:
void unregister_v4l(void *_priv) { struct artemis_priv *priv = (struct artemis_priv *)_priv; v4l2_async_unregister_subdev(&priv->sd); media_entity_cleanup(&priv->sd.entity); priv->subdev->sd = NULL; // Add this line }
- To allow module unloading, set the subdevice pointer to NULL after unregistering:
-
Review and correct subdevice operations:
- Ensure that only allowed operations are implemented. Refer to the Nvidia documentation for allowed interfaces:
https://docs.nvidia.com/jetson/archives/r35.4.1/DeveloperGuide/text/SD/CameraDevelopment/SensorSoftwareDriverProgramming.html#v4l2-control-ops
- Ensure that only allowed operations are implemented. Refer to the Nvidia documentation for allowed interfaces:
-
Handle CSI clock frequency:
- Set the CSI clock frequency in the s_stream callback function:
static int artemis_s_stream(struct v4l2_subdev *sd, int enable) { struct artemis_priv *priv = to_artemis(sd); struct tegra_csi_channel *chan = to_csi_chan(sd); if (enable && chan && chan->csi) { chan->csi->clk_freq = your_desired_frequency; } // Rest of the s_stream implementation }
- Set the CSI clock frequency in the s_stream callback function:
-
Debug Tegra camera pipeline binding:
- Ensure that the subdevice notifier is not implemented, as it can cause pipeline binding failures.
- Review the device tree topology and ensure it matches the expected camera pipeline structure.
-
Investigate null pointer issues:
- Add null checks before accessing potentially null pointers:
if (chan && chan->s_data) { // Access chan->s_data } else { dev_err(&priv->client->dev, "Invalid channel or s_data\n"); return -EINVAL; }
- Add null checks before accessing potentially null pointers:
-
Review Tegra camera documentation:
- Consult the Tegra camera development guide for proper implementation of bridge devices:
https://docs.nvidia.com/jetson/archives/r35.4.1/DeveloperGuide/text/SD/CameraDevelopment/CameraDevelopment.html
- Consult the Tegra camera development guide for proper implementation of bridge devices:
-
Check for JetPack updates:
- Verify if there are any updates or patches available for JetPack R35 that address known issues with V4L2 subdevice handling on Orin Nano.
-
Implement minimal control handler:
- Even if not using controls, implement a minimal control handler to ensure proper functionality:
v4l2_ctrl_handler_init(&priv->ctrl_handler, 0); priv->sd.ctrl_handler = &priv->ctrl_handler;
- Even if not using controls, implement a minimal control handler to ensure proper functionality:
-
Use Tegra-specific debugging tools:
- Utilize Tegra-specific debugging tools and logs to identify any platform-specific issues:
sudo tegrastats sudo nvargus-daemon
- Utilize Tegra-specific debugging tools and logs to identify any platform-specific issues:
If the issue persists after trying these solutions, consider reaching out to Nvidia developer support or posting a detailed bug report on the Nvidia Developer Forums with complete logs and system information.