
Runtime Error When Creating Camera Object on Nvidia Jetson Orin Nano Dev Board
Issue Overview
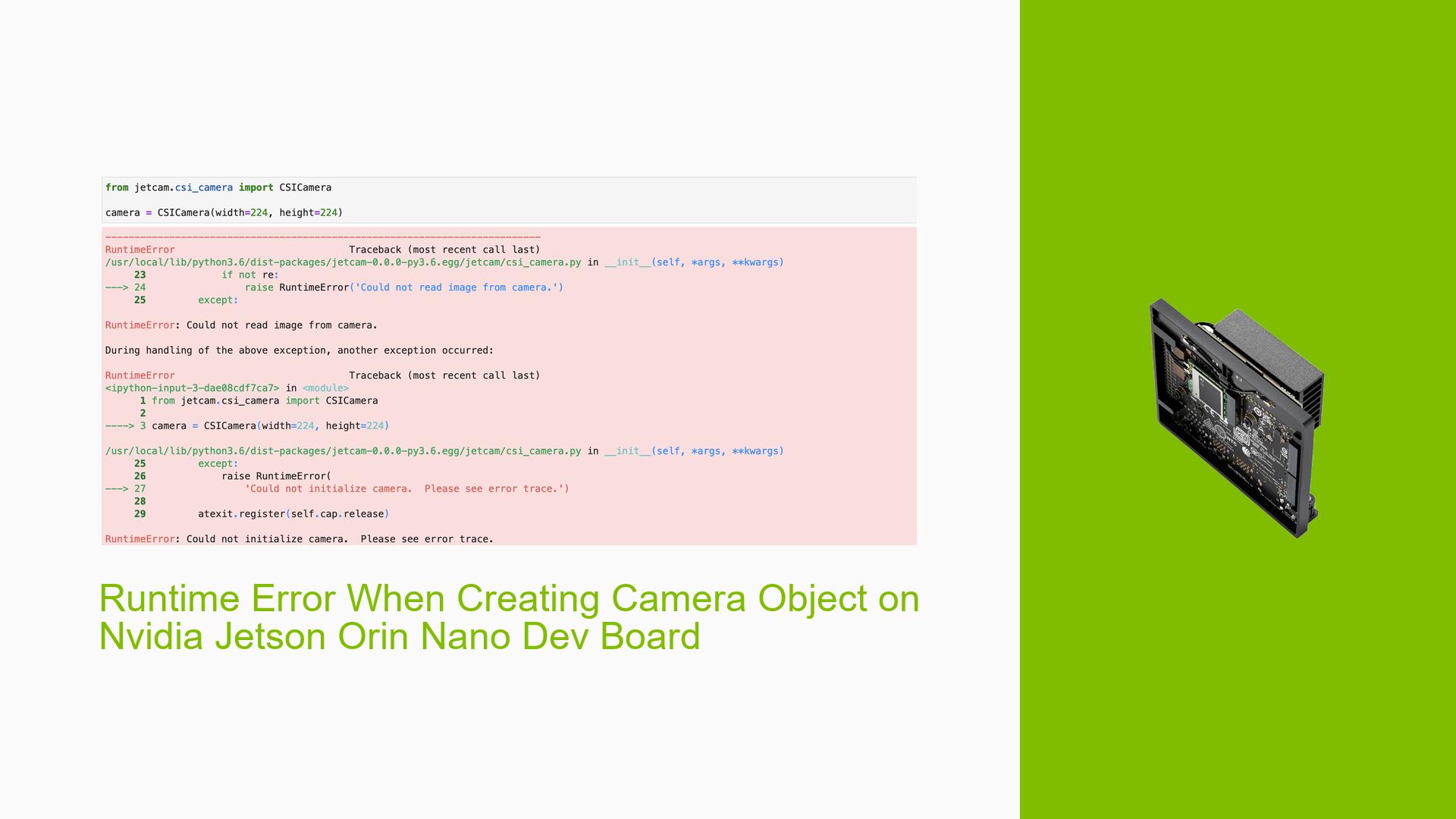
Users are experiencing a RuntimeError when attempting to create a camera object using the CSICamera class from the jetcam library in a Jupyter notebook on the Nvidia Jetson Orin Nano Dev board. The error occurs specifically when executing the following code block:
from jetcam.csi_camera import CSICamera
camera = CSICamera(width=224, height=224, capture_device=0)
The error message indicates that the system could not read an image from the camera:
RuntimeError: Could not read image from camera.
Context
- The issue arises during the execution of Jupyter notebooks, particularly when running in a Docker container.
- The hardware setup includes a CSI Raspberry Pi v2 camera, and users have confirmed that the camera works outside of Docker, indicating that the issue may be related to the Docker configuration or package compatibility.
- Users have reported inconsistent experiences; some can run the camera successfully in a direct Jetson environment but encounter errors when using Docker.
Frequency and Impact
The problem appears to be recurring among multiple users, significantly impacting their ability to utilize camera functionality within their projects. This leads to frustration as they cannot leverage the full capabilities of their development board.
Possible Causes
- Hardware Incompatibilities: The use of specific camera models (e.g., IMX219) may not be fully supported in Docker environments.
- Software Bugs or Conflicts: The version of the jetcam library or its dependencies might not be compatible with JetPack 5 and Docker configurations.
- Configuration Errors: Incorrect setup in Docker or JupyterLab may lead to issues with accessing hardware devices like cameras.
- Driver Issues: Missing or outdated drivers for the camera could prevent it from being recognized properly.
- Environmental Factors: Running in a Docker container could introduce limitations that affect device access.
- User Errors or Misconfigurations: Potential misconfigurations in Docker settings or JupyterLab could lead to these runtime errors.
Troubleshooting Steps, Solutions & Fixes
Step-by-Step Instructions
-
Verify Camera Connection:
- Ensure that the camera is correctly connected and recognized by running:
!ls -ltrh /dev/video* - Check if
/dev/video0is listed.
- Ensure that the camera is correctly connected and recognized by running:
-
Check Device List:
- Use
v4l2-ctlto list devices:v4l2-ctl --list-devices
- Use
-
Run Outside Docker:
- Test running the same code directly on the Jetson board without Docker to confirm that it works outside of containerized environments.
-
Update Packages:
- Ensure that all relevant packages are up-to-date:
sudo apt-get update sudo apt-get install jetcam
- Ensure that all relevant packages are up-to-date:
-
Modify Docker Run Command:
- Use a modified command to run Docker with appropriate device access:
sudo docker run --runtime nvidia -it --rm --network host \ --volume ~/nvdli-data:/nvdli-nano/data \ --volume /tmp/argus_socket:/tmp/argus_socket \ --device /dev/video0 \ nvcr.io/nvidia/dli/dli-nano-ai:v2.0.2-r32.7.1
- Use a modified command to run Docker with appropriate device access:
-
Use Compatible Containers:
- If using DLI containers, ensure they are compatible with JetPack 5 and switch to an updated container if necessary:
nvcr.io/nvidia/l4t-ml:r35.2.1-py3
- If using DLI containers, ensure they are compatible with JetPack 5 and switch to an updated container if necessary:
-
Check for GStreamer Issues:
- If encountering shared library errors, ensure GStreamer is properly installed and configured within your Docker environment.
-
Test Different Capture Devices:
- If using multiple cameras (CSI and USB), test each one individually to determine if the issue is specific to one type.
-
Consult Documentation and Community Resources:
- Refer to NVIDIA’s official documentation for any updates on known issues with specific JetPack versions or containers.
-
Best Practices for Future Prevention:
- Always ensure compatibility between hardware and software versions before starting projects.
- Regularly check for updates from NVIDIA regarding JetPack and related libraries.
Recommended Approach
Several users have reported success after ensuring they were using compatible versions of libraries and running tests outside of Docker, making this a recommended troubleshooting step.
Unresolved Aspects
Further investigation may be needed regarding specific driver issues related to different camera models and how they interact within Docker environments, as well as potential updates from NVIDIA regarding software compatibility with JetPack 5.x.
By following these steps, users should be able to diagnose and potentially resolve the runtime error encountered when creating a camera object on their Nvidia Jetson Orin Nano Dev board.