
Jetson Orin Nano Dev Kit SPI Not Working
Issue Overview
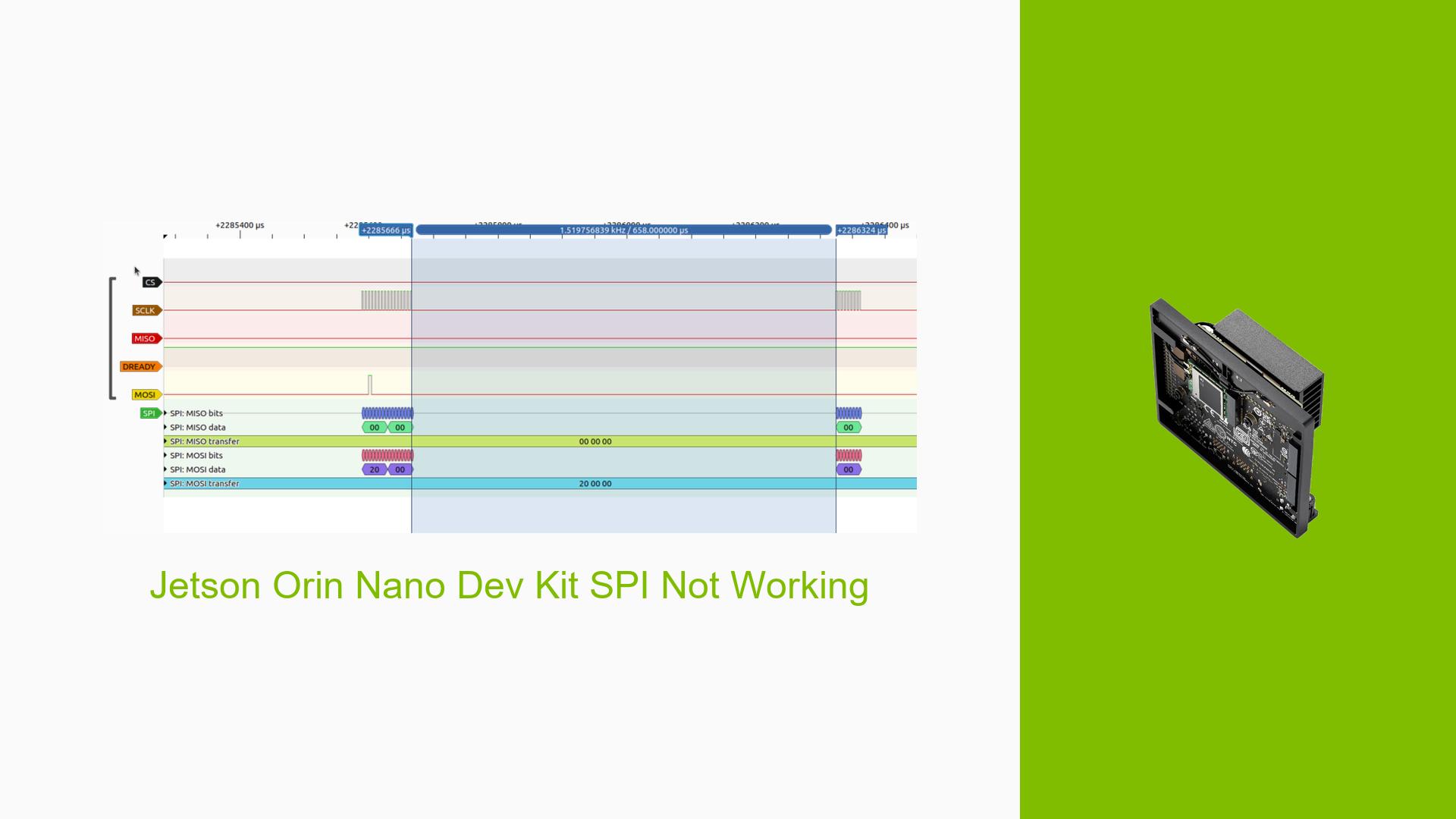
Users are experiencing issues with the SPI interface on the Jetson Orin Nano Dev Kit, particularly when attempting to read data from an A/D HAT connected via the 40-pin connector. The specific symptoms include:
- No MISO Data: Users report that the MISO line appears to be pulled low, leading to no data being read.
- Working Components: The same A/D HAT functions correctly on other platforms like the Raspberry Pi 5 and Jetson Nano.
- Clock Functionality: The CS, SCLK, and MOSI lines operate as expected at a clock rate of 200 kHz.
- Testing Context: Issues arise during setup and testing phases, particularly when performing loopback tests and interfacing with SPI devices.
- Frequency of Issue: This problem has been reported consistently across multiple users, indicating a potential systemic issue rather than isolated incidents.
The impact on user experience is significant, as it prevents successful data acquisition from connected SPI devices, hindering development and functionality.
Possible Causes
Several potential causes for the SPI issues on the Jetson Orin Nano Dev Kit have been identified:
- Hardware Incompatibility: The A/D HAT may not be fully compatible with the Jetson Orin Nano’s SPI configuration.
- Software Bugs or Conflicts: There may be bugs in the Jetpack version or conflicts with other installed drivers affecting SPI functionality.
- Configuration Errors: Incorrect pinmux settings or device tree configurations could lead to improper signal handling.
- Driver Issues: The necessary drivers for SPI communication may not be loaded or configured correctly.
- Environmental Factors: Issues such as long cable lengths or inadequate drive strength could affect signal integrity.
- User Errors: Misconfigurations during setup or testing could lead to erroneous results.
Troubleshooting Steps, Solutions & Fixes
To resolve the SPI issues on the Jetson Orin Nano Dev Kit, follow these comprehensive troubleshooting steps:
-
Verify Driver Installation
- Ensure that the
spidevkernel module is loaded:lsmod | grep spidev
- Ensure that the
-
Check Device Tree Configuration
- Confirm that the device tree is correctly configured for SPI. Use the following command to check:
sudo cat /proc/device-tree/pinmux@700008d4 - Look for correct pin configurations for MISO, MOSI, SCLK, and CS signals.
- Confirm that the device tree is correctly configured for SPI. Use the following command to check:
-
Run Loopback Test
- Connect MOSI and MISO directly for a loopback test:
- Connect MOSI (Pin 19) to MISO (Pin 21).
- Execute the loopback test:
./spidev_test -D /dev/spidev0.0 -v -p "Hello World" - Check if data is echoed back correctly.
- Connect MOSI and MISO directly for a loopback test:
-
Adjust SPI Clock Rate
- If issues persist, try reducing the SPI clock frequency to 40 MHz:
echo 40000000 > /sys/class/spi/spi0/spi0_speed
- If issues persist, try reducing the SPI clock frequency to 40 MHz:
-
Use Shorter Cables
- If using extended cables, switch to shorter cables (around 10 cm) to improve signal integrity.
-
Inspect Pinmux Settings
- Verify that pinmux settings are correctly applied by running:
sudo /opt/nvidia/jetson-io/jetson-io.py - Ensure that SPI pins are configured properly and save changes before rebooting.
- Verify that pinmux settings are correctly applied by running:
-
Examine Power Supply
- Ensure that the power supply is stable and meets requirements for both the Jetson board and connected peripherals.
-
Consult Documentation
- Check NVIDIA’s official documentation for any updates or changes related to SPI configuration on the Jetson Orin Nano Dev Kit.
-
Community Support
- Engage with community forums for additional insights and shared experiences from other users facing similar issues.
-
Future Prevention
- Regularly update Jetpack and related drivers to ensure compatibility and access to bug fixes.
By following these steps, users should be able to diagnose and potentially resolve issues with the SPI interface on their Jetson Orin Nano Dev Kit. If problems persist after these steps, further investigation into specific hardware or software configurations may be necessary.