
Camera Driver Development Issues on Nvidia Jetson Orin Nano Dev Board
Issue Overview
Users are encountering challenges while developing drivers for custom sensors that transmit data via the Camera Serial Interface (CSI) on the Nvidia Jetson Orin Nano Dev board. The primary symptoms include:
-
Driver Implementation Confusion: Developers are unsure which functions need to be implemented in their drivers, particularly regarding sensor control functions like power management and streaming.
-
Device Registration Issues: There is uncertainty about how the Video4Linux2 (V4L2) subsystem recognizes CSI signal configurations such as lanes, format, framerate, and clockspeed.
-
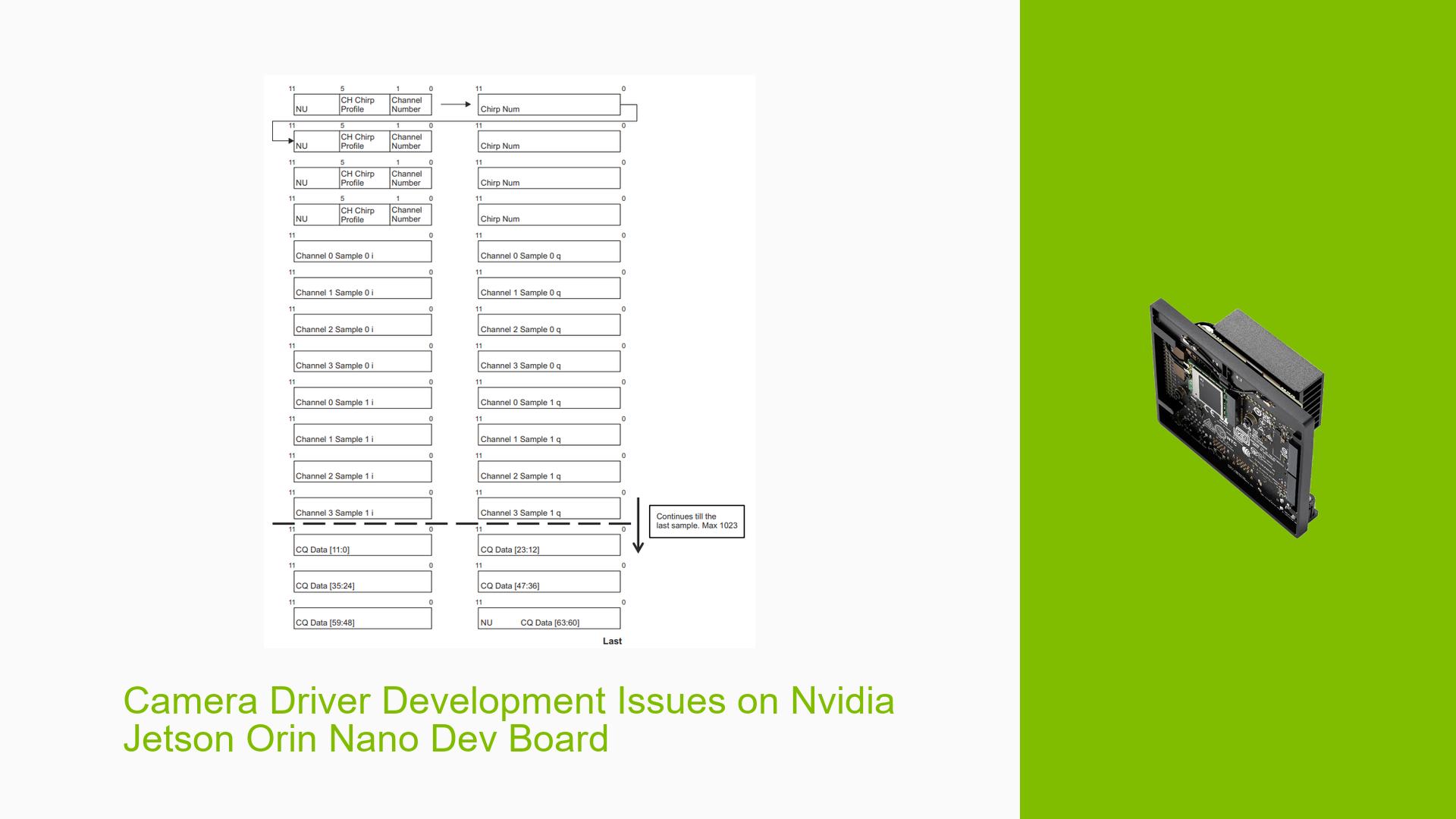
Data Format Handling: Users are working with non-image data (e.g., RAW ADC data from radar sensors) that follows the CSI protocol, leading to questions about how to handle varying frame dimensions and configurations.
-
Frequency of Occurrence: These issues appear consistently during driver development and testing phases.
-
Impact on User Experience: The inability to correctly implement the driver functions can prevent successful camera node registration and data streaming, significantly impairing functionality.
Possible Causes
Several potential reasons for these issues have been identified:
-
Hardware Configuration Errors: Incorrect setup of the sensor or its connection to the Jetson board may lead to communication failures.
-
Software Bugs: Incomplete or incorrect implementation of driver functions could prevent proper initialization and operation of the sensor.
-
Configuration Errors: Misconfigurations in the Device Tree or V4L2 settings may result in improper recognition of the CSI signal parameters.
-
Driver Issues: If essential functions like power management or streaming are left unimplemented or incorrectly coded, it can lead to failures in device registration.
-
Environmental Factors: Power supply inconsistencies or thermal issues could affect sensor performance.
-
User Misconfigurations: Incorrect assumptions about required driver functions or CSI configurations may lead to implementation errors.
Troubleshooting Steps, Solutions & Fixes
To address these issues effectively, users can follow these troubleshooting steps and solutions:
-
Review Documentation:
- Consult the NVIDIA Jetson Linux Developer Guide for guidance on driver development and V4L2 integration.
-
Implement Essential Functions:
- Ensure that at least the following functions are implemented:
probe(): To register the device.open(): To handle device opening.remove(): To clean up when the device is removed.
- Consider implementing power management functions if necessary for your specific use case.
- Ensure that at least the following functions are implemented:
-
Device Tree Configuration:
- Verify that the Device Tree is correctly configured with signal bindings for your sensor.
- Check if a Device Tree Parser function is needed based on your sensor’s requirements.
-
Testing Driver Functionality:
- Use the
v4l2-ctlcommand to test camera functionality and ensure that it can recognize your sensor’s settings. - Example command:
v4l2-ctl --list-formats-ext
- Use the
-
Resetting VI Engine:
- If experiencing issues with streaming, consider issuing a reset for the Video Input (VI) engine to ensure it recognizes incoming signals correctly.
-
Handling Non-image Data:
- For sensors transmitting non-image data (like RAW ADC data), ensure that your driver can handle variable frame sizes dynamically without requiring a driver reload.
-
Debugging Frame Data:
- Analyze sample frame packets to understand how different configurations affect data transmission.
- Share examples of frame packets with peers for collaborative troubleshooting.
-
Community Resources:
- Explore similar discussions in forums for additional insights and potential solutions. Refer to topics such as Topic 256575, Topic 238270, and Topic 200846 for related experiences.
-
Best Practices:
- Regularly update drivers and firmware to incorporate fixes from NVIDIA.
- Document any changes made during development for future reference and troubleshooting.
By following these steps, users can systematically diagnose and resolve issues related to camera driver development on the Nvidia Jetson Orin Nano Dev board. Further investigation may be needed if problems persist after attempting these solutions.