
Using Raspberry Pi HQ Camera (IMX477) with Jetson Orin Nano Developer Kit
Issue Overview
Users are experiencing difficulties when attempting to use the Raspberry Pi HQ camera (IMX477) with the Jetson Orin Nano Developer Kit. The main challenges include:
- Lack of clear tutorials or references for proper setup and usage
- Issues with driver detection and loading
- Difficulties in capturing images or using the camera with OpenCV
The problem occurs during the initial setup and configuration of the camera with the Jetson Orin Nano board. Users report errors when trying to access the camera device, suggesting potential driver or configuration issues.
Possible Causes
-
Missing or incorrectly configured camera driver: The IMX477 driver may not be properly enabled or loaded on the Jetson Orin Nano.
-
Incorrect device configuration: The camera might not be correctly recognized or configured in the Jetson-io settings.
-
Hardware compatibility issues: There could be potential conflicts between the Raspberry Pi HQ camera and the Jetson Orin Nano Developer Kit.
-
Software conflicts: Existing software or configurations might interfere with the camera’s operation.
-
Incorrect wiring or connections: The camera may not be properly connected to the Jetson Orin Nano board.
Troubleshooting Steps, Solutions & Fixes
-
Enable the IMX477 driver:
- Use the jetson-io tool to enable the driver for the IMX477 camera.
- Follow the guide at: https://docs.arducam.com/Nvidia-Jetson-Camera/Application-note/Jetson-io/
-
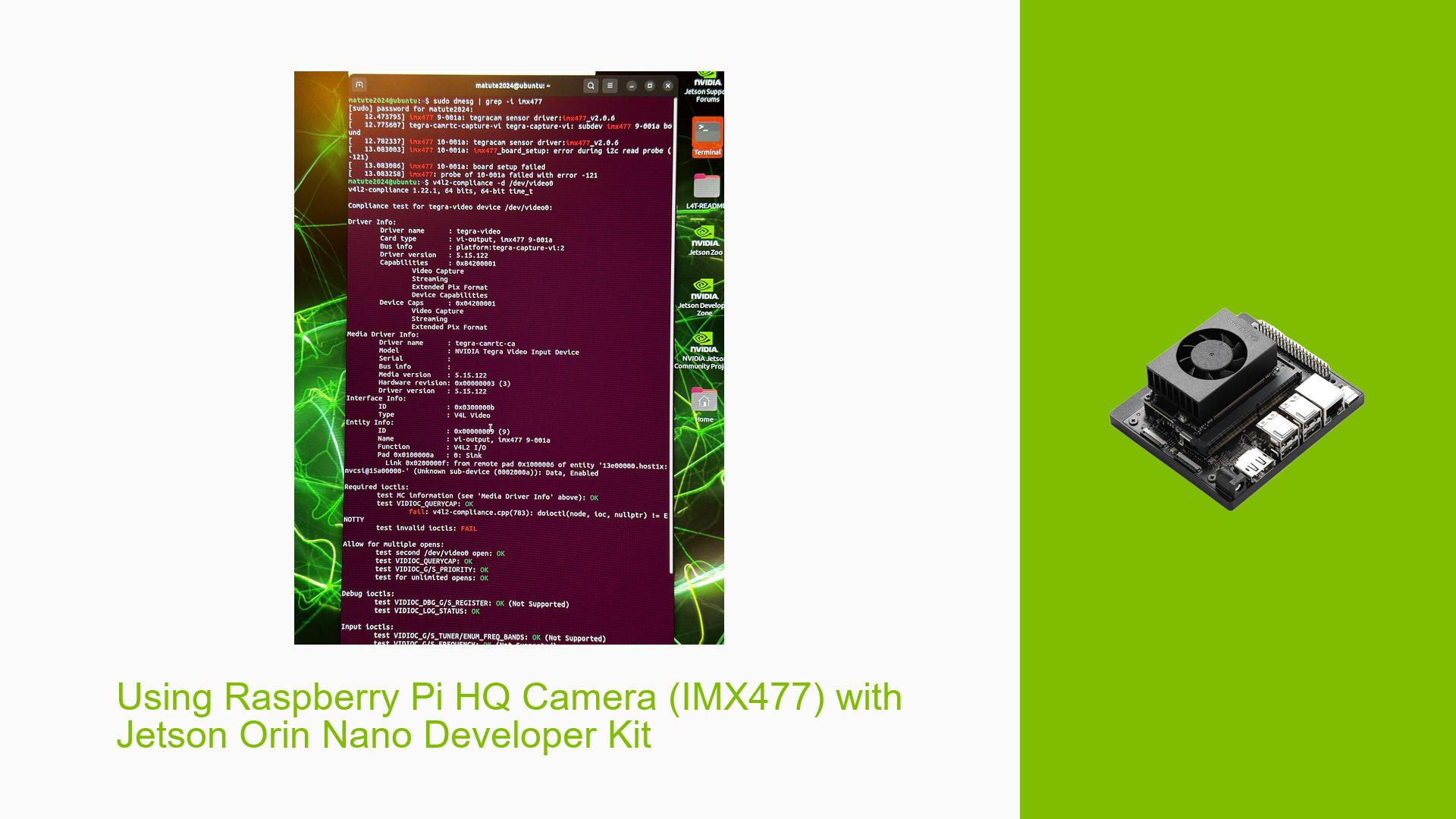
Verify driver loading:
- Check if the driver is correctly loaded by running:
sudo dmesg | grep -i imx477 - If you see an error like "probe of 9-001a failed with error -121", proceed to the next step.
- Check if the driver is correctly loaded by running:
-
Hardware modification (if necessary):
- Some users reported success after removing the R8 resistor on the camera board.
- Refer to the RidgeRun Developer Wiki for more information: https://developer.ridgerun.com/wiki/index.php/Raspberry_Pi_HQ_camera_IMX477_Driver
-
Confirm camera detection:
- Use the v4l2-ctl tool to check if the camera is detected:
v4l2-ctl --list-devices - If the camera is not listed, double-check your connections and driver configuration.
- Use the v4l2-ctl tool to check if the camera is detected:
-
Test camera functionality:
- Use the following command to test if the camera is working:
gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM),width=3820, height=2464, framerate=21/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw,width=960, height=616' ! nvvidconv ! nvegltransform ! nveglglessink -e
- Use the following command to test if the camera is working:
-
OpenCV integration:
- To use the camera with OpenCV, you’ll need to capture frames from the camera using GStreamer pipeline and then convert them to OpenCV format.
- Here’s a basic Python script to get started:
import cv2 def gstreamer_pipeline( capture_width=3280, capture_height=2464, display_width=820, display_height=616, framerate=21, flip_method=0, ): return ( "nvarguscamerasrc ! " "video/x-raw(memory:NVMM), " "width=(int)%d, height=(int)%d, " "format=(string)NV12, framerate=(fraction)%d/1 ! " "nvvidconv flip-method=%d ! " "video/x-raw, width=(int)%d, height=(int)%d, format=(string)BGRx ! " "videoconvert ! " "video/x-raw, format=(string)BGR ! appsink" % ( capture_width, capture_height, framerate, flip_method, display_width, display_height, ) ) cap = cv2.VideoCapture(gstreamer_pipeline(), cv2.CAP_GSTREAMER) if not cap.isOpened(): print("Cannot open camera") exit() while True: ret, frame = cap.read() if not ret: print("Can't receive frame (stream end?). Exiting ...") break cv2.imshow('frame', frame) if cv2.waitKey(1) == ord('q'): break cap.release() cv2.destroyAllWindows()
-
Troubleshoot common issues:
- If you encounter "Cannot open device /dev/video0" error, ensure that the camera is properly connected and the driver is loaded.
- For permission issues, add your user to the video group:
sudo usermod -aG video $USERThen log out and log back in for the changes to take effect.
-
Update Jetson software:
- Ensure you have the latest JetPack and L4T (Linux for Tegra) versions installed on your Jetson Orin Nano.
- Check for any available updates and install them:
sudo apt update sudo apt upgrade
By following these steps, most users should be able to successfully set up and use the Raspberry Pi HQ camera (IMX477) with their Jetson Orin Nano Developer Kit. If issues persist, consider reaching out to NVIDIA’s developer forums or support channels for further assistance.