
Connecting Multiple Cameras to Jetson Orin Nano: Limitations and Solutions
Issue Overview
Users are encountering challenges when attempting to connect and use multiple cameras simultaneously with the Nvidia Jetson Orin Nano development kit. The specific requirements include:
- Using 4 cameras concurrently in real-time
- Performing semantic object detection from 4 different angles
- Determining compatibility with both CSI/MIPI and USB cameras
- Understanding the limitations of the Jetson Orin Nano’s camera inputs
The issue impacts users who need to implement complex computer vision projects requiring multiple camera inputs, potentially limiting the functionality and performance of their systems.
Possible Causes
-
Hardware Limitations: The Jetson Orin Nano development kit has limited MIPI inputs, restricting the number of directly connectable cameras.
-
Bandwidth Constraints: When using USB cameras, users may encounter bandwidth limitations, similar to issues observed with Jetson Nano and Xavier NX models.
-
Compatibility Issues: Not all camera types may be equally compatible or performant with the Jetson Orin Nano, leading to potential conflicts or suboptimal performance.
-
Lack of Appropriate Accessories: The absence of suitable adapters or expansion boards may prevent users from connecting the desired number of cameras.
Troubleshooting Steps, Solutions & Fixes
-
Use CSI/MIPI Cameras:
- NVIDIA recommends using CSI/MIPI cameras for multi-camera setups to avoid bandwidth constraints associated with USB cameras.
- Check NVIDIA’s partner ecosystem for compatible CSI/MIPI cameras: Jetson Ecosystem.
-
Consider Third-Party Development Kits:
- Explore alternative development kits designed for expanded camera support, such as the AETINA AIB-MO22/32 or AIB-MN32/42.
- These kits offer a 128-pin 8-lane MIPI camera interface, potentially allowing for more camera connections.
-
Utilize MIPI Adapter Boards:
- Implement a 6-to-1 MIPI adapter board to support up to 4 cameras on the Orin Nano.
- Each camera should output a 2-lane MIPI signal for compatibility.
-
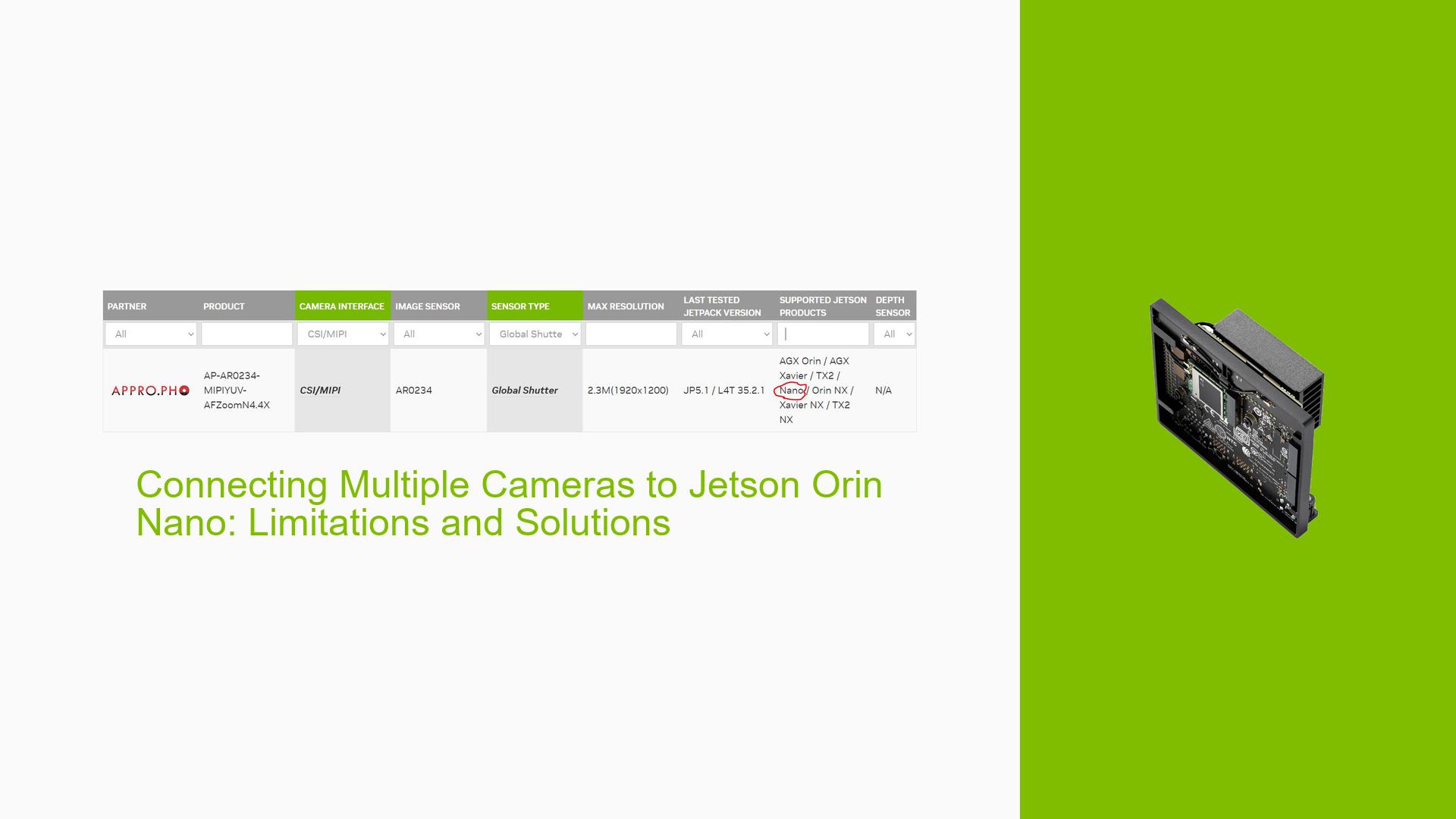
Select Compatible Cameras:
- Consider using cameras specifically designed for Jetson devices, such as the AR0234 zoom camera with 36-pin MIPI output.
- Ensure the chosen cameras are compatible with the Jetson Orin Nano’s specifications and the adapter board if used.
-
Optimize Camera Configuration:
- If using fewer than 4 cameras is acceptable, configure the system to use the two available MIPI inputs on the Orin Nano development kit.
- Adjust your object detection algorithm to work with fewer camera inputs if necessary.
-
Explore Alternative Solutions:
- If USB cameras are preferred, consider using multiple Jetson Orin Nano boards, each handling a subset of the cameras to circumvent bandwidth limitations.
- Investigate the possibility of using a single high-resolution camera with a wide field of view and implementing software-based view splitting for multi-angle detection.
-
Check for Software Updates:
- Regularly update the Jetson SDK and associated drivers to ensure optimal performance and compatibility with various camera setups.
- Monitor NVIDIA’s developer forums and documentation for new solutions or workarounds for multi-camera configurations.
-
Consult with NVIDIA Partners:
- Reach out to NVIDIA’s ecosystem partners specializing in camera solutions for Jetson devices for tailored advice and potentially custom hardware solutions.
By following these steps and exploring the suggested solutions, users should be able to overcome the limitations of the Jetson Orin Nano’s camera inputs and successfully implement their multi-camera computer vision projects.