
Understanding CAN Communication and Loopback Testing on Nvidia Jetson Orin Nano
Issue Overview
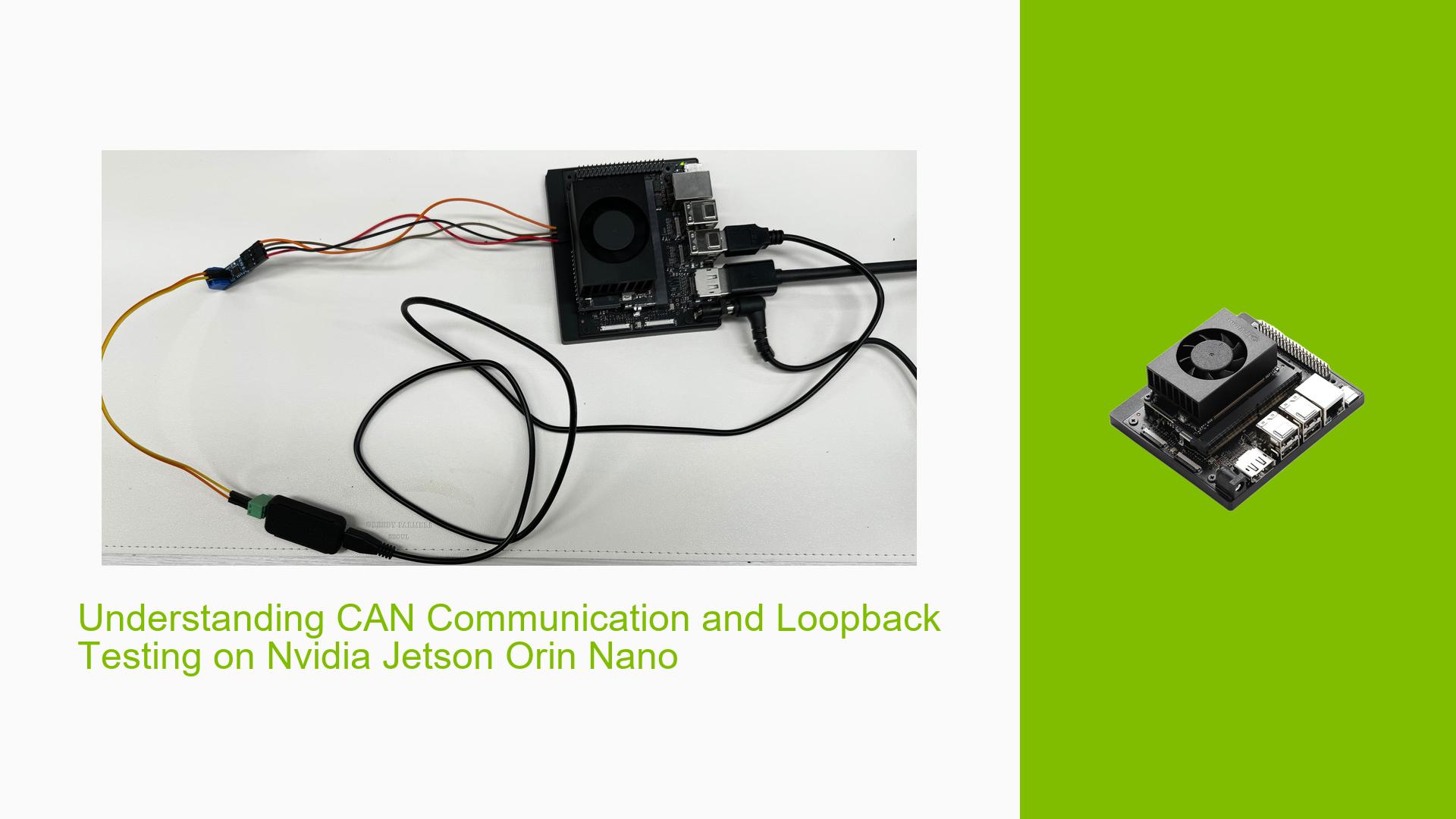
Users are exploring the implementation of CAN (Controller Area Network) communication using the Nvidia Jetson Orin Nano board. A specific inquiry revolves around the functionality of loopback tests, particularly why a loopback test works even when initial steps are skipped.
-
Symptoms: Users report successful execution of a loopback test despite skipping the first step in the procedure. This raises questions about the expected behavior of the CAN communication setup.
-
Context: The issue occurs during the setup and testing phase for CAN communication on the Jetson Orin Nano, where users attempt to verify their configurations through loopback testing.
-
Hardware/Software Specifications:
- Device: Nvidia Jetson Orin Nano
- JetPack Version: Not specified in detail, but relevant to the setup.
- Additional Hardware: Users mention using a USB-CAN adapter and CAN transceiver for physical connections.
-
Frequency: This inquiry is likely common among developers working with CAN communication on embedded systems.
-
Impact on User Experience: Understanding the behavior of loopback tests is crucial for users to ensure that their CAN setups are functioning correctly and to troubleshoot any potential issues.
Possible Causes
Several factors may explain why the loopback test works despite skipping initial steps:
-
Internal Loopback Functionality: The Jetson Orin Nano may support an internal loopback mode that allows for testing without needing external connections. This means that even if users skip certain steps, they can still achieve successful communication through internal mechanisms.
-
Configuration Defaults: The system may have default settings that enable loopback functionality automatically, allowing users to bypass initial setup steps without affecting the outcome.
-
Physical Connection Requirements: For physical loopback testing, proper connections between CAN RX and TX pins are necessary. If users have connected these pins correctly, it could explain why they observe successful communication regardless of skipped steps.
Troubleshooting Steps, Solutions & Fixes
To assist users in understanding and implementing CAN communication with the Nvidia Jetson Orin Nano, follow these troubleshooting steps:
-
Verify Device Configuration:
- Confirm that your Jetson Orin Nano is set up correctly for CAN communication. Check device settings and ensure that necessary drivers are installed.
-
Review Loopback Testing Steps:
- Follow the prescribed steps for performing a loopback test. If you skip steps, document which ones were missed to understand their relevance.
- Perform a standard loopback test using:
ip link set can0 type can bitrate 500000 ip link set up can0 candump can0
-
Conduct Physical Loopback Testing:
- If you want to perform a physical loopback test, solder the optional CAN header and connect the CAN RX and TX pins directly.
- Ensure you have a compatible CAN transceiver connected to facilitate communication.
-
Use Appropriate Tools:
- Utilize tools like
candumpandcansendto send and receive messages over the CAN network. - Example commands:
cansend can0 123#deadbeef
- Utilize tools like
-
Monitor System Logs:
- Check system logs for any errors or warnings related to CAN communication or device initialization using:
dmesg | grep can
- Check system logs for any errors or warnings related to CAN communication or device initialization using:
-
Consult Documentation and Community Resources:
- Refer to Nvidia’s documentation regarding CAN communication on Jetson devices for additional guidance.
- Engage with community forums or support channels for insights from other users who may have faced similar challenges.
-
Unresolved Aspects:
- Users may still need clarification regarding specific configurations or settings required for successful operation of their CAN setup.
- Further investigation into how internal loopback is implemented on the Jetson Orin Nano could provide additional insights into its functionality.
By following these steps, users should be able to effectively troubleshoot and implement CAN communication on their Nvidia Jetson Orin Nano devices while understanding the nuances of loopback testing.