
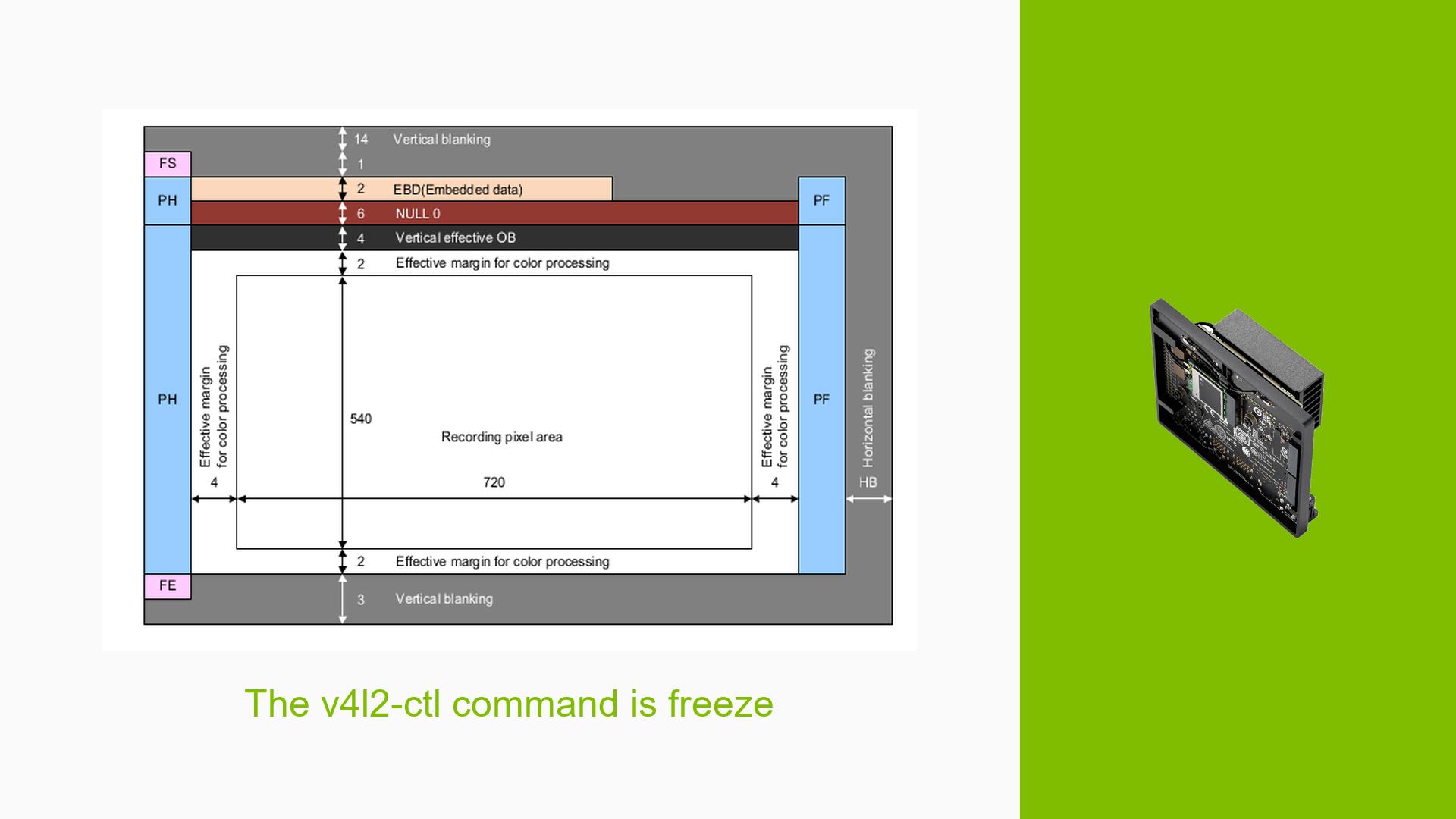
The v4l2-ctl command is freeze
Issue Overview
Users are experiencing issues with the v4l2-ctl command when attempting to capture images from an IMX297 sensor on the Nvidia Jetson Orin Nano Dev board. The specific symptoms include:
- The command does not return any data and appears to freeze until the process is manually stopped.
v4l2-ctl -d /dev/video0 --set-ctrl bypass_mode=0 --stream-mmap --stream-count=-1 --stream-to=/dev/null
- The
dmesglog reveals multiple warnings about frames being discarded due to invalid capture status:
bwmgr API not supported
tegra-camrtc-capture-vi tegra-capture-vi: corr_err: discarding frame 79, flags: 0, err_data 131072
- The issue occurs consistently when using
v4l2-ctl, while capturing frames via Argus works without problems.
The impact of this issue significantly affects the user experience, as it prevents successful image capture through a commonly used command-line tool, limiting functionality for applications relying on video capture.
Possible Causes
Several potential causes for the issue have been identified:
-
Hardware Incompatibilities: The IMX297 sensor may have compatibility issues with the Jetson Orin Nano’s hardware or driver support.
-
Software Bugs or Conflicts: There may be bugs in the
v4l2-ctlimplementation or conflicts with other software components that affect video capture. -
Configuration Errors: Incorrect settings in the device tree or improper configuration of the sensor parameters can lead to capture failures.
-
Driver Issues: Problems with the camera driver could prevent proper communication between the sensor and the Jetson platform.
-
Environmental Factors: Issues such as power supply instability or overheating could affect sensor performance.
-
User Errors or Misconfigurations: Misconfiguration of parameters like lane polarity or embedded metadata settings may lead to capture errors.
Each of these causes can lead to the observed problem by disrupting the expected flow of data from the sensor to the processing application.
Troubleshooting Steps, Solutions & Fixes
To address the issue, users can follow these troubleshooting steps and potential solutions:
-
Check Sensor Configuration:
- Ensure that the device tree properties are correctly configured, particularly
embedded_metadata_height. If your sensor does not support embedded metadata, set this value to0.
- Ensure that the device tree properties are correctly configured, particularly
-
Verify Lane Polarity Settings:
- Check if lane polarity settings are correctly specified in the device tree. For instance, ensure that you are using correct polarity settings for CSI data lines as per Nvidia’s documentation.
-
Review dmesg Logs:
- Use
sudo dmesgto review logs for any additional error messages that may provide insights into what is going wrong during image capture.
- Use
-
Test with Different Configurations:
- Experiment with different configurations in the device tree, especially focusing on parameters such as
num_lanes,mclk_khz, and pixel format settings. - Example configuration snippet:
mode0 { // All Pixel Mode num_lanes = "1"; embedded_metadata_height = "2"; // Adjust based on sensor capabilities ... } - Experiment with different configurations in the device tree, especially focusing on parameters such as
-
Use Debugging Tools:
- Utilize debugging tools to trace camera operations and identify where failures occur. This can help confirm whether embedded metadata is being parsed correctly.
-
Update Drivers and Firmware:
- Ensure that you are using the latest drivers and firmware for both your Jetson Orin Nano and IMX297 sensor. Check Nvidia’s official sources for updates.
-
Consult Documentation:
- Refer to Nvidia’s Jetson Orin NX Series Design Guide for detailed information on camera connections and configurations.
- Review relevant driver source code for insights on specific settings related to your hardware configuration.
-
Seek Community Support:
- If issues persist, consider reaching out to community forums with detailed logs and configurations for further assistance from other users or experts familiar with similar setups.
By following these steps, users should be able to diagnose and potentially resolve issues related to using v4l2-ctl with their IMX297 sensors on the Jetson Orin Nano Dev board.