
Rosrun cv_camera_node failed with GStreamer
Issue Overview
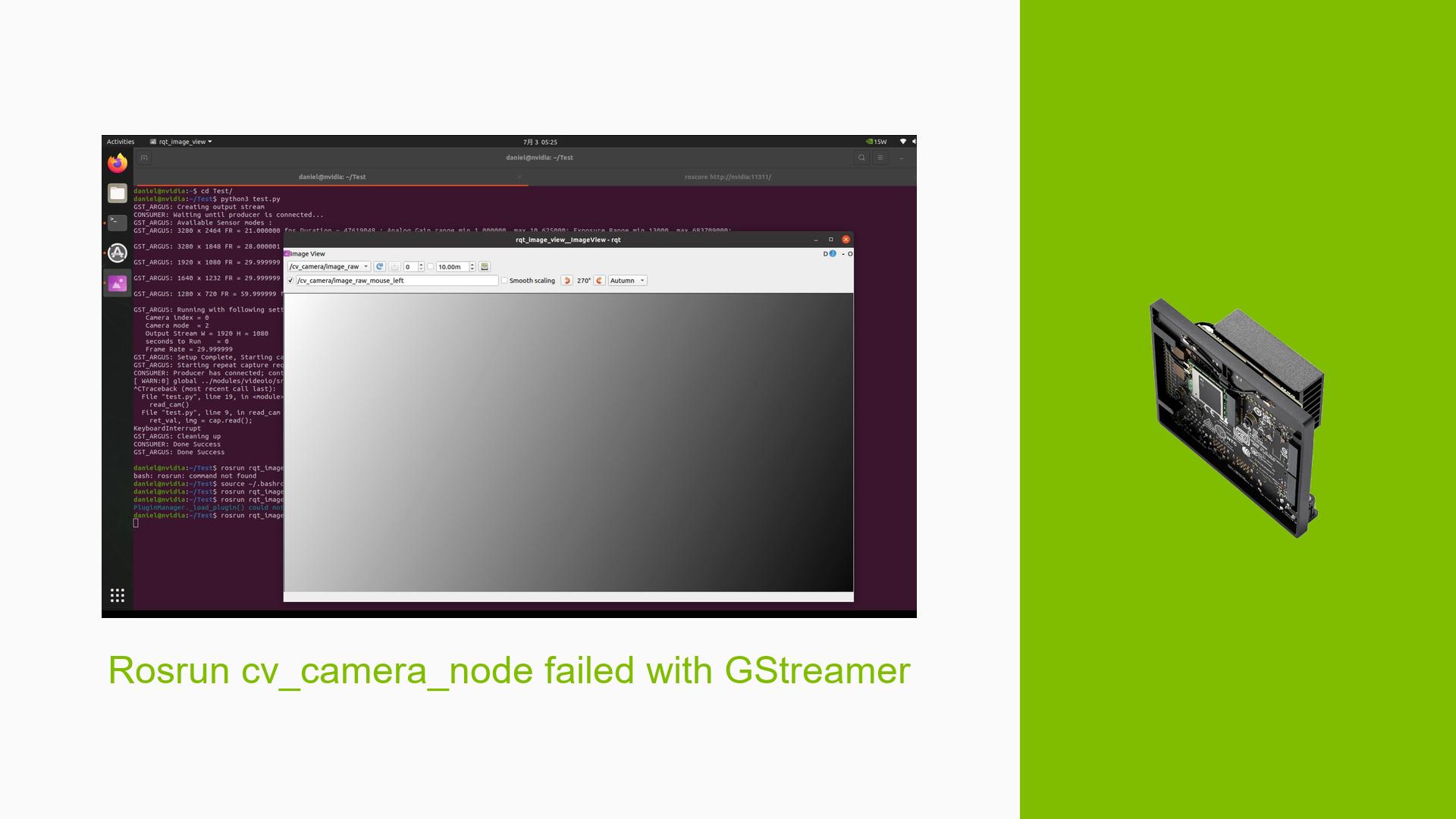
Users are encountering issues when attempting to run the cv_camera_node with a CSI camera on the Nvidia Jetson Orin Nano Dev board. The specific symptoms include warnings and critical errors related to GStreamer during the launch of the camera node. The following errors were reported:
- GStreamer Warnings: Users see messages indicating that elements are in incorrect states (e.g., PAUSED instead of NULL) and that pipelines are not created successfully.
- OpenCV Errors: The warning
VIDEOIO(GSTREAMER): can't create capturesuggests that OpenCV is unable to establish a video capture pipeline. - Context: This issue arises during the execution of the command
$ rosrun cv_camera cv_camera_node, after installing the necessary ROS package withsudo apt-get install ros-noetic-cv-camera. - Hardware/Software Specifications: Users are working with the IMX219 CSI camera and OpenCV built with GStreamer support on a Jetson platform.
- Frequency: This issue appears consistently across multiple users, indicating a common problem.
- Impact: The inability to access camera feeds significantly hampers development and testing efforts for robotics applications.
Possible Causes
-
Hardware Incompatibilities: The camera may not support the requested resolution or frame rate settings.
- Explanation: If the camera does not support certain modes, it can lead to failure in establishing a pipeline.
-
Software Bugs or Conflicts: There may be bugs in the
cv_camerapackage or conflicts with other installed packages.- Explanation: Bugs in handling GStreamer pipelines can cause critical failures.
-
Configuration Errors: Incorrect parameters in the GStreamer pipeline specified within OpenCV.
- Explanation: Misconfiguration can prevent successful pipeline creation.
-
Driver Issues: Outdated or incompatible drivers for the camera or GStreamer.
- Explanation: Driver issues can lead to improper functioning of hardware components.
-
Environmental Factors: Power supply issues or overheating could affect performance.
- Explanation: Insufficient power can lead to erratic behavior of connected devices.
-
User Errors or Misconfigurations: Incorrect usage of commands or parameters by users new to ROS and OpenCV.
- Explanation: New users may not be familiar with required configurations, leading to errors.
Troubleshooting Steps, Solutions & Fixes
-
Verify Camera Functionality:
- Run the following command to check if the camera works independently:
gst-launch-1.0 nvarguscamerasrc ! nvvidconv ! video/x-raw,format=I420 ! xvimagesink sync=0 - If this command works, it confirms that the camera hardware is functioning properly.
- Run the following command to check if the camera works independently:
-
Check Supported Modes:
- Ensure that your camera supports the requested resolution and frame rate by running:
gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, format=(string)NV12, framerate=(fraction)30/1' ! nvoverlaysink - Adjust width, height, and framerate according to what your camera supports.
- Ensure that your camera supports the requested resolution and frame rate by running:
-
Inspect OpenCV Build Configuration:
- Verify that OpenCV was built with GStreamer support:
import cv2 print(cv2.getBuildInformation()) - Look for "GStreamer" in the output; it should indicate "YES".
- Verify that OpenCV was built with GStreamer support:
-
Test GStreamer Pipeline in OpenCV:
- Use a simple test script to check if you can read from a GStreamer pipeline:
import cv2 cap = cv2.VideoCapture("nvarguscamerasrc ! video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, format=(string)NV12 ! nvvidconv ! video/x-raw, format=(string)BGRx ! appsink", cv2.CAP_GSTREAMER) if not cap.isOpened(): print("Failed to open video capture") exit(-1) while True: ret_val, img = cap.read() if not ret_val: print("Failed to read from video capture") break cv2.imshow('Camera Feed', img) if cv2.waitKey(1) == ord('q'): break cap.release() cv2.destroyAllWindows()
- Use a simple test script to check if you can read from a GStreamer pipeline:
-
Update Drivers and Packages:
- Ensure all relevant packages and drivers are up-to-date:
sudo apt-get update sudo apt-get upgrade
- Ensure all relevant packages and drivers are up-to-date:
-
Check for User Errors:
- Review command syntax and ensure proper usage as per documentation for both ROS and OpenCV.
-
Community Resources:
- Refer to community forums for similar issues and solutions shared by other users who faced comparable problems [NVIDIA Developer Forums].
-
Reinstall Packages:
- If issues persist, consider reinstalling ROS packages related to
cv_cameraand OpenCV with GStreamer support.
- If issues persist, consider reinstalling ROS packages related to
By following these steps, users should be able to diagnose and potentially resolve issues related to using the cv_camera_node with GStreamer on Nvidia Jetson platforms.