
Jetpack 6.0: Image Corruption in Captured Camera Frames
Issue Overview
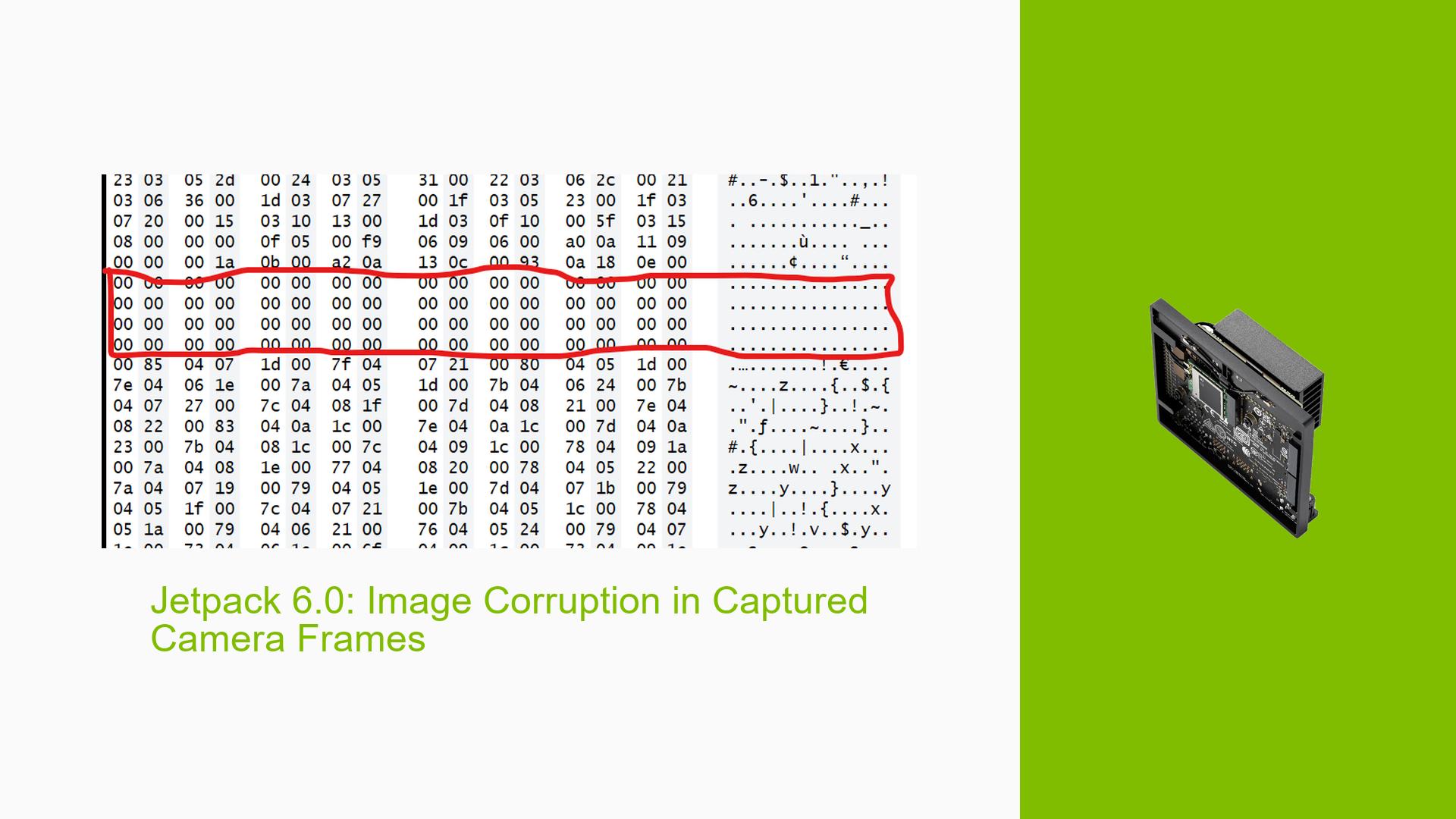
Users of the Nvidia Jetson Orin Nano Developer Kit running Jetpack 6.0 (with Jetson Linux 36.3 driver package) are experiencing image corruption when capturing frames from a camera sensor connected to the CAM0 connector. The issue manifests as clusters of null values appearing in multiple places within the captured image. This problem seems to be specific to the Jetpack 6.0 production release SDK (L4T_36_3), as it was not present in previous versions such as Jetpack 5.1.2.
The issue occurs during frame capture using V4L2 commands, specifically when using a custom camera sensor driver that has been migrated to the new SDK. Despite successful probing of the camera sensor and the absence of CSI or CRC error events in debug traces, the captured frames exhibit these clusters of null values, potentially affecting image quality and downstream processing.
Possible Causes
-
Kernel Regression: The issue may be caused by a regression in the kernel, particularly related to memory control. This could affect how image data is handled and stored, leading to the observed null value clusters.
-
Timing Issues: There’s a possibility that the problem stems from timing discrepancies between the camera sensor and the image capture process, potentially introduced in the new SDK.
-
Driver Compatibility: The migration of the V4L2 camera sensor driver to the new SDK might have introduced compatibility issues or exposed existing bugs that were not apparent in previous versions.
-
SDK-Specific Bug: The problem appears to be a known issue specific to the Jetpack 6.0 release, suggesting a bug in the SDK itself rather than a hardware or configuration problem.
Troubleshooting Steps, Solutions & Fixes
-
Skip Frames:
As a temporary workaround, try skipping as many frames as possible during capture. This may help mitigate the issue in the current release.v4l2-ctl --device /dev/video0 --set-fmt-video=width=2560,height=512,pixelformat=RGGB --stream-mmap --stream-to=frame.bin --stream-count=1 --skip-frames=10Adjust the
--skip-framesvalue as needed. -
Analyze Debayered Image:
Examine the image after debayering to better understand the nature of the corruption:# Assuming you have a tool like dcraw installed dcraw -v -D -4 -T frame.binThis may provide insights into whether the issue is related to the raw data capture or if it’s affecting the color channels differently.
-
Check for Updates:
Regularly check for updates to Jetpack 6.0 or any interim patches that might address this issue. Nvidia is aware of the problem and is working on a fix for the next release. -
Revert to Previous Version:
If possible and if your project timeline allows, consider temporarily reverting to Jetpack 5.1.2 where the issue was not present. This could be a viable solution while waiting for an official fix. -
Monitor Memory Usage:
Given the possibility of a kernel regression related to memory control, monitor the system’s memory usage during frame capture:watch -n 1 free -mLook for any anomalies or unexpected memory allocation patterns.
-
Investigate VI-mode 16:
There’s a related issue regarding raw image corruption (line artifacts) through VI-mode 16. While it may not be exactly the same problem, investigating this could provide additional insights or workarounds. -
Contact Nvidia Support:
If the issue persists and significantly impacts your development, consider reaching out to Nvidia support directly. Provide them with:- Detailed description of the issue
- Your hardware configuration
- Jetpack version and build number
- Sample corrupted images
- Any relevant log files or debug traces
-
Community Collaboration:
Stay engaged with the Nvidia developer community forums. Share your findings and collaborate with other developers who might be experiencing similar issues. This can help in identifying patterns or discovering unofficial workarounds.
It’s worth accentuating that Nvidia is aware of this issue and is working on a fix. The next release, which may include the fix, is tentatively scheduled for the end of the year, although this timeline is not guaranteed. In the meantime, developers should implement the suggested workarounds and stay updated on any official communications from Nvidia regarding this issue.