
Issues with Nvidia Jetson Orin Nano Dev Board Camera Configuration
Issue Overview
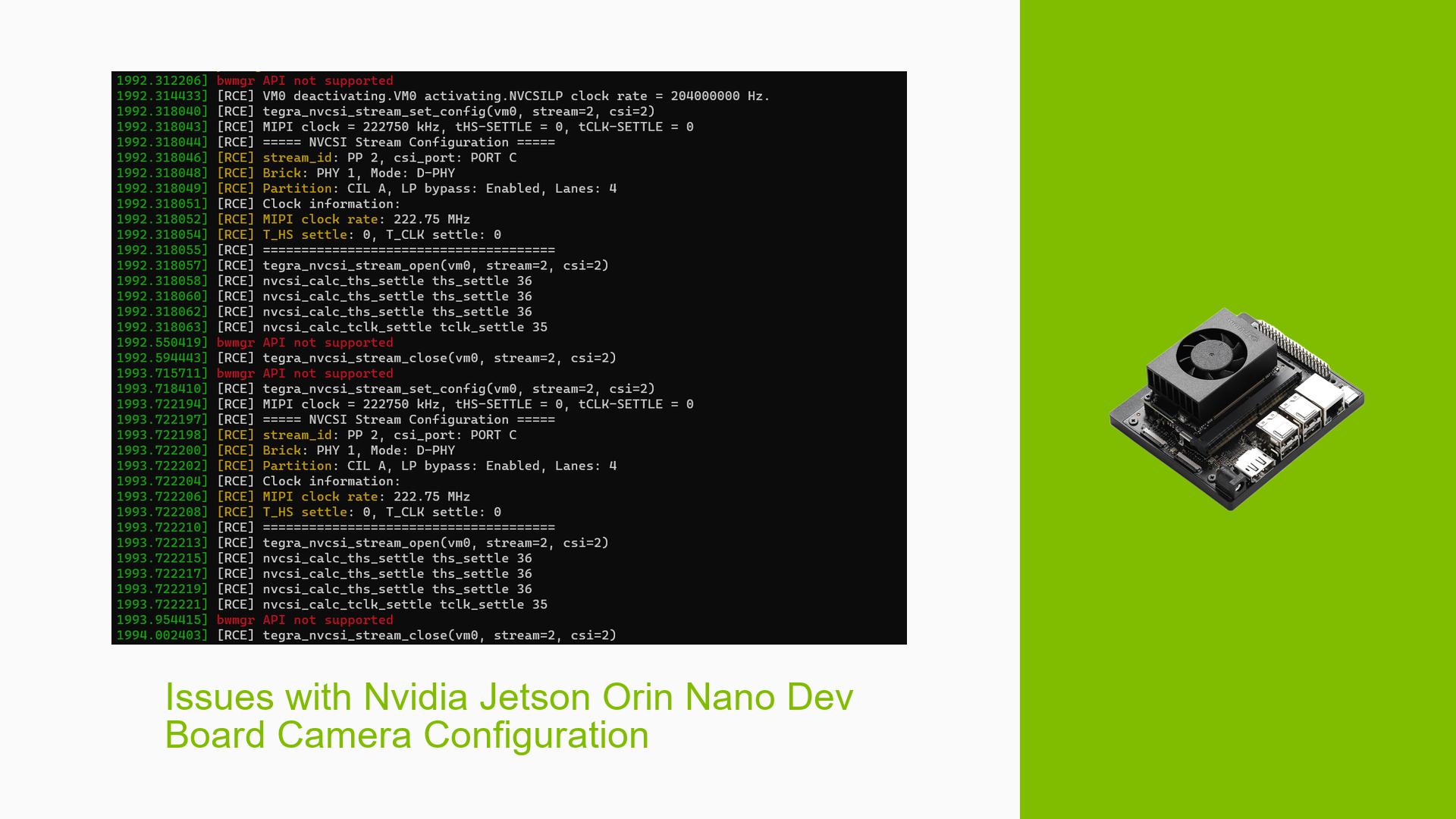
Users have reported difficulties with the Nvidia Jetson Orin Nano Dev Board, specifically related to the camera configuration using the Tegra_nvcsi_stream_set_config function. The main symptoms include:
-
Error Messages: Users experience logs indicating that the nvcsi stream configuration did not work when connecting an FPGA to a specific MIPI camera interface (cam0).
-
Context: The issue arises during the camera setup phase, particularly when trying to capture images or stream video from a camera connected to the board.
-
Hardware and Software Specifications: Users are operating on the jp5.1.1 R35.3.1 version of the Orin Nano with a 4GB configuration, utilizing the imx390 camera model.
-
Frequency of Issue: The problem appears to be isolated to one MIPI camera interface (cam0), while other interfaces (cam1 and cam2) seem to function correctly under similar conditions.
-
Impact on User Experience: This issue significantly hampers users’ ability to utilize the camera functionality of the Orin Nano, affecting applications that rely on real-time image processing or video streaming.
Possible Causes
Several potential causes for this issue have been identified:
-
Hardware Incompatibilities: The Orin Nano may have limitations in supporting 4-lane configurations on certain camera slots due to CSI clock constraints.
-
Software Bugs or Conflicts: There may be bugs in the current software version impacting camera initialization or stream configuration.
-
Configuration Errors: Incorrect parameters in the device tree source (DTS) file could lead to improper camera initialization.
-
Driver Issues: Outdated or incompatible drivers might result in failure to establish a proper connection with the camera.
-
Environmental Factors: Power supply issues or temperature fluctuations could affect hardware performance.
-
User Errors or Misconfigurations: Users may inadvertently misconfigure settings, such as lane polarity or port bindings, leading to operational failures.
Troubleshooting Steps, Solutions & Fixes
To address the issues encountered with the Nvidia Jetson Orin Nano Dev Board, follow these troubleshooting steps:
-
Verify Port Binding:
- Check that the port binding is correctly configured for your specific camera setup.
- Use commands to review and confirm port binding results.
-
Review Device Tree Configuration:
- Ensure that your device tree configuration accurately reflects your hardware setup.
- Pay particular attention to lane polarity settings and ensure they are correctly defined.
- Example configuration snippet:
lane_polarity = [36 00]; // Adjust as necessary
-
Test Different Configurations:
- If using a 4-lane camera, try switching to a 2-lane configuration on different MIPI ports (e.g., cam1 or cam2) to see if this resolves the issue.
- Confirm compatibility with your specific camera model (imx390).
-
Update Drivers and Firmware:
- Ensure that you are running the latest drivers and firmware for your Jetson Orin Nano.
- Check Nvidia’s official site for any updates related to your hardware.
-
Monitor System Logs:
- Use system logs to identify any errors during initialization.
- Commands such as
dmesgcan be helpful in diagnosing issues during boot or runtime.
-
Isolation Tests:
- Disconnect any additional peripherals and test with only essential hardware connected.
- This can help isolate whether external components are contributing to the problem.
-
Consult Documentation:
- Refer to the Jetson Orin NX Series and Orin Nano Series Design Guide for specific configuration examples and best practices.
- Pay attention to sections regarding CSI connections and lane configurations.
-
Seek Community Support:
- If issues persist, consider reaching out on forums or support channels where other users may have encountered similar problems.
-
Recommended Approach:
- Several users noted success by adjusting lane polarity settings in their DTS files; this is a recommended first step if you encounter similar issues.
By following these steps, users can systematically diagnose and potentially resolve issues related to camera configuration on their Nvidia Jetson Orin Nano Dev Board.