
Issues with Connecting Lepton 3.5 to Nvidia Jetson Orin Nano
Issue Overview
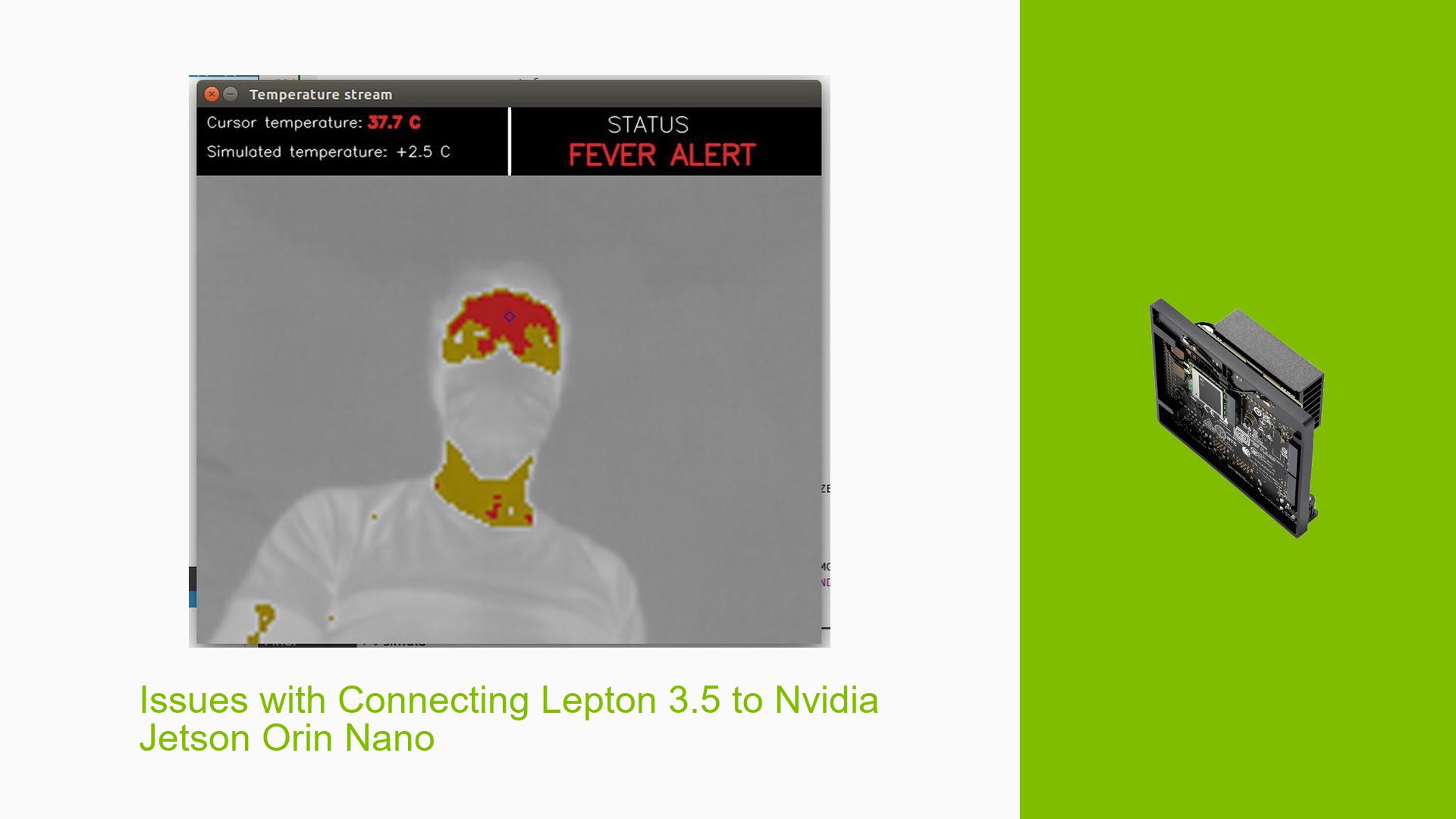
Users are experiencing difficulties while attempting to connect a FLIR Lepton 3.5 thermal camera to the Nvidia Jetson Orin Nano Dev board via SPI (Serial Peripheral Interface). The symptoms include:
- Successful SPI loopback tests, indicating that the SPI interface is operational.
- Failure to receive valid data from the Lepton camera, resulting in garbage data output.
- Error messages such as "*** Forcing RESYNC ***" when attempting to read data using specific libraries and code samples.
- Users have confirmed that I2C (Inter-Integrated Circuit) communication is functioning correctly on I2C-1.
The issue arises during the setup and operation phases, particularly when trying to read data from the camera after configuring the necessary connections. Users have reported inconsistent results, with some successfully using similar setups on Raspberry Pi but facing challenges on the Jetson platform. The impact of this problem significantly hampers user experience, as it prevents the intended functionality of capturing thermal images.
Possible Causes
Several potential causes for this issue have been identified:
-
Hardware Incompatibilities or Defects: The custom board design may not be fully compatible with the Jetson Orin Nano’s SPI implementation.
-
Software Bugs or Conflicts: The PyLepton library and other Python forks may not be compatible with the current Jetson configurations, leading to communication failures.
-
Configuration Errors: Incorrect settings in the configuration files or pinmux settings may prevent proper communication between the camera and the Jetson board.
-
Driver Issues: Outdated or incompatible drivers could hinder proper SPI or I2C functionality.
-
Environmental Factors: Power supply issues or temperature fluctuations may affect hardware performance.
-
User Errors or Misconfigurations: Incorrect wiring or misconfigured software settings could lead to communication failures.
Troubleshooting Steps, Solutions & Fixes
To diagnose and resolve the issue, follow these comprehensive troubleshooting steps:
-
Verify Hardware Connections:
- Ensure that all connections between the Lepton camera and Jetson Orin Nano are secure and correctly configured.
- Confirm that the correct pins are being used for SPI (MISO, MOSI, CS) and I2C connections.
-
Check SPI Configuration:
- Use the Jetson I/O tool (
/opt/nvidia/jetson-io/jetson-io.py) to verify that SPI is enabled correctly. - Ensure that CS (Chip Select) is configured properly for your setup (e.g., CS0 on pin 24).
- Use the Jetson I/O tool (
-
Run Loopback Test:
- Execute a loopback test using the provided Python script to confirm that SPI functionality is intact:
import spidev import time spi = spidev.SpiDev() spi.open(0, 1) # bus 0, device 1 spi.max_speed_hz = 500000 spi.mode = 0 msg = [0xFF, 0xAA, 0x55, 0x00] while True: resp = spi.xfer2(msg) if resp == msg: print("SPI loopback test passed") else: print("SPI loopback test failed") time.sleep(1)
- Execute a loopback test using the provided Python script to confirm that SPI functionality is intact:
-
Capture Serial Console Logs:
- Use a serial USB adapter to connect and capture full console logs for further diagnosis.
-
Review Software Libraries:
- If using PyLepton or similar libraries, check for compatibility issues with Jetson configurations.
- Consider switching to alternative libraries such as Myzhar’s Lepton3_Jetson library which has been reported to work effectively:
- Follow setup instructions from Myzhar’s GitHub repository.
-
Modify Library Code:
- If using Myzhar’s library, make necessary changes in specific files as follows:
- In
Lepton3.cpp, changemSpiModefromSPI_MODE_1toSPI_MODE_3. - In
opencv_demo.cpp, ensure you are using/dev/i2c-1for I2C connections.
- In
- If using Myzhar’s library, make necessary changes in specific files as follows:
-
Recompile Kernel (if necessary):
- If issues persist related to CS pin handling or other low-level configurations, consider downloading kernel source and applying relevant patches as discussed in forum replies.
-
Best Practices for Future Prevention:
- Always verify compatibility of libraries with your specific hardware configuration before proceeding with installations.
- Keep firmware and software up-to-date to avoid bugs related to older versions.
By following these steps meticulously, users should be able to diagnose and potentially resolve issues related to connecting their FLIR Lepton 3.5 camera with the Nvidia Jetson Orin Nano Dev board.