
Camera Streaming Issue: 4-Lane Configuration Failure on Nvidia Jetson Orin Nano Dev Board
Issue Overview
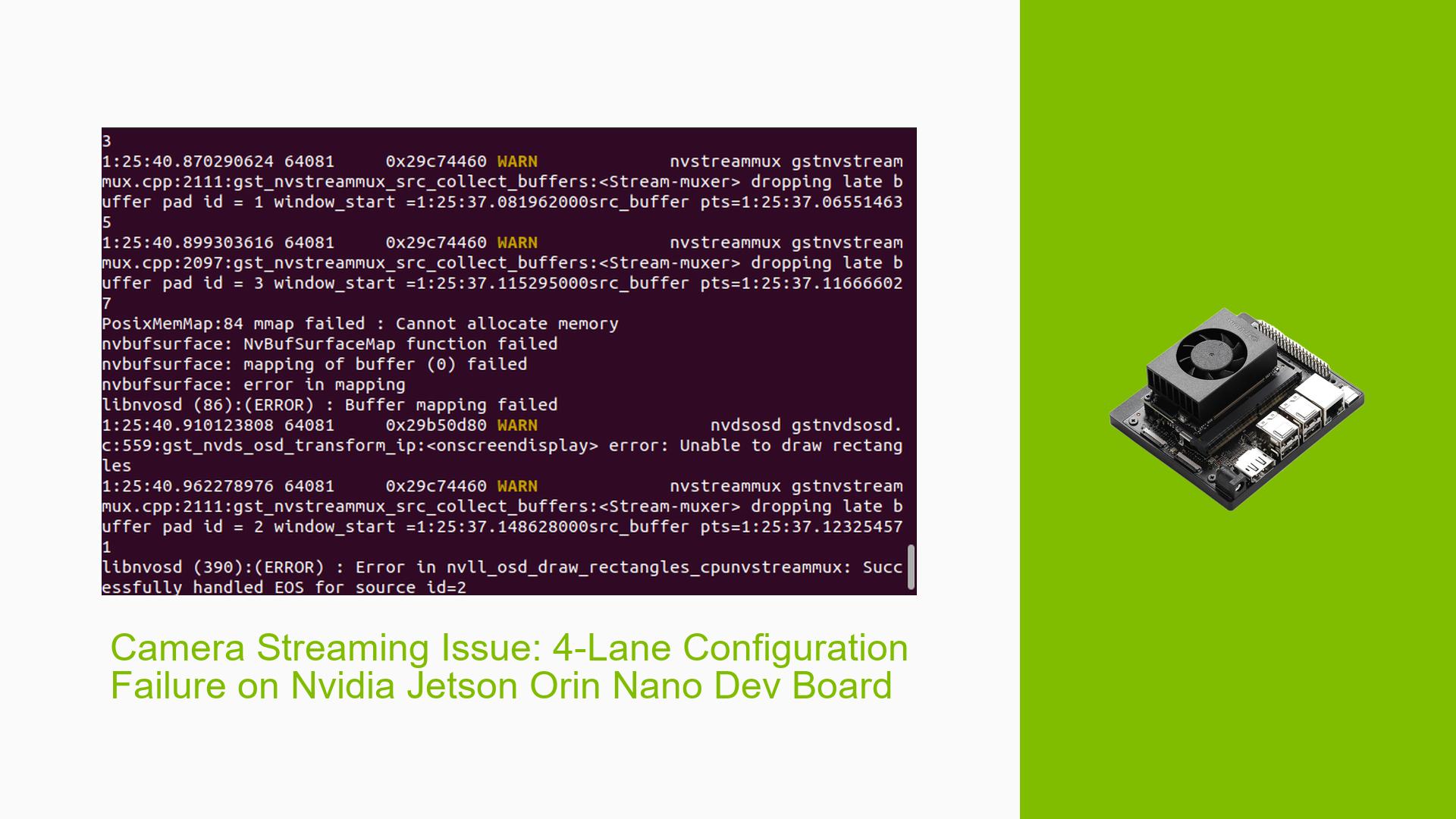
Users of the Nvidia Jetson Orin Nano Dev board are experiencing difficulties when attempting to stream camera data using a 4-lane configuration. While the camera streams successfully in 2-lane mode, it fails to function properly when switched to 4 lanes. The issue appears to be related to the camera interface configuration rather than the camera hardware itself.
The problem manifests as frame discarding errors, which are logged in the system messages. These errors consistently show a corr_err (correlation error) with flags set to 0 and err_data of 131072. The issue occurs during the camera streaming process and significantly impacts the functionality of the camera system on the dev board.
Possible Causes
-
Incorrect NVCSI Endpoint Configuration: The transition from 2-lane to 4-lane mode requires changes in the NVCSI (NVIDIA Camera Serial Interface) endpoint settings. An improper configuration of the bus-width parameter could lead to communication errors.
-
Deserializer Misconfiguration: As the deserializer is connected to CAM1 (since CAM0 only supports 2 lanes), there might be issues with the deserializer settings specific to the 4-lane mode.
-
DTS (Device Tree Specification) Configuration Errors: The device tree configuration may not be properly set up for 4-lane operation, leading to incompatibilities between the hardware and software layers.
-
Driver or Firmware Issues: The camera or interface drivers may have bugs or incompatibilities when operating in 4-lane mode.
-
Hardware Limitations: Although unlikely (as the user is 98% sure it’s not a camera hardware issue), there could be physical limitations or defects in the camera module or the dev board’s camera interface.
Troubleshooting Steps, Solutions & Fixes
-
Verify NVCSI Endpoint Configuration:
- Double-check that the bus-width is correctly set to 4 on both NVCSI endpoints and camera endpoints.
- Ensure that the port-index remains set to 2, as mentioned in the original configuration.
-
Review Deserializer Configuration:
- Examine the deserializer configuration specific to 4-lane mode operation.
- Consult the deserializer documentation to ensure all settings are appropriate for 4-lane streaming.
-
Analyze DTS Configuration:
- Review the Device Tree Specification (DTS) files related to the camera interface.
- Compare your configuration with known working 4-lane setups for the Jetson Orin Nano.
- Look for any discrepancies or missing parameters that might be required for 4-lane operation.
-
Enable Detailed Logging:
To gather more information about the issue, enable detailed logging using the following commands:echo 1 > /sys/kernel/debug/tracing/tracing_on echo 30720 > /sys/kernel/debug/tracing/buffer_size_kb echo 1 > /sys/kernel/debug/tracing/events/tegra_rtcpu/enable echo 1 > /sys/kernel/debug/tracing/events/freertos/enable echo 2 > /sys/kernel/debug/camrtc/log-level echo 1 > /sys/kernel/debug/tracing/events/camera_common/enable echo > /sys/kernel/debug/tracing/traceAfter running these commands, reproduce the issue and then capture the logs:
cat /sys/kernel/debug/tracing/trace > camera_trace_log.txtAnalyze the resulting
camera_trace_log.txtfile for more detailed error messages or clues about the root cause. -
Check for Driver and Firmware Updates:
- Visit the NVIDIA Developer website and check for any available updates for the Jetson Orin Nano.
- Look specifically for camera-related driver or firmware updates that might address 4-lane streaming issues.
-
Isolate Hardware Issues:
- If possible, test the camera module on another Jetson Orin Nano board to rule out hardware-specific problems.
- Try a different camera module (if available) to determine if the issue is specific to the current hardware.
-
Consult NVIDIA Developer Forums:
- Search the NVIDIA Developer Forums for similar issues related to 4-lane camera streaming on Jetson platforms.
- If no solution is found, consider posting a detailed description of your issue, including the logs and steps you’ve taken, to seek assistance from the community or NVIDIA support staff.
-
Investigate RTCPU Logs:
- While not directly addressed in the provided solutions, investigating how to incorporate RTCPU logs into dmesg could provide valuable debugging information.
- Research NVIDIA documentation or community resources for methods to integrate RTCPU logging with dmesg on the Jetson platform.
By following these steps and analyzing the results, you should be able to identify the root cause of the 4-lane streaming failure and implement an appropriate solution. If the issue persists after trying these troubleshooting steps, consider reaching out to NVIDIA support for further assistance, providing them with all the gathered logs and information about your configuration.