
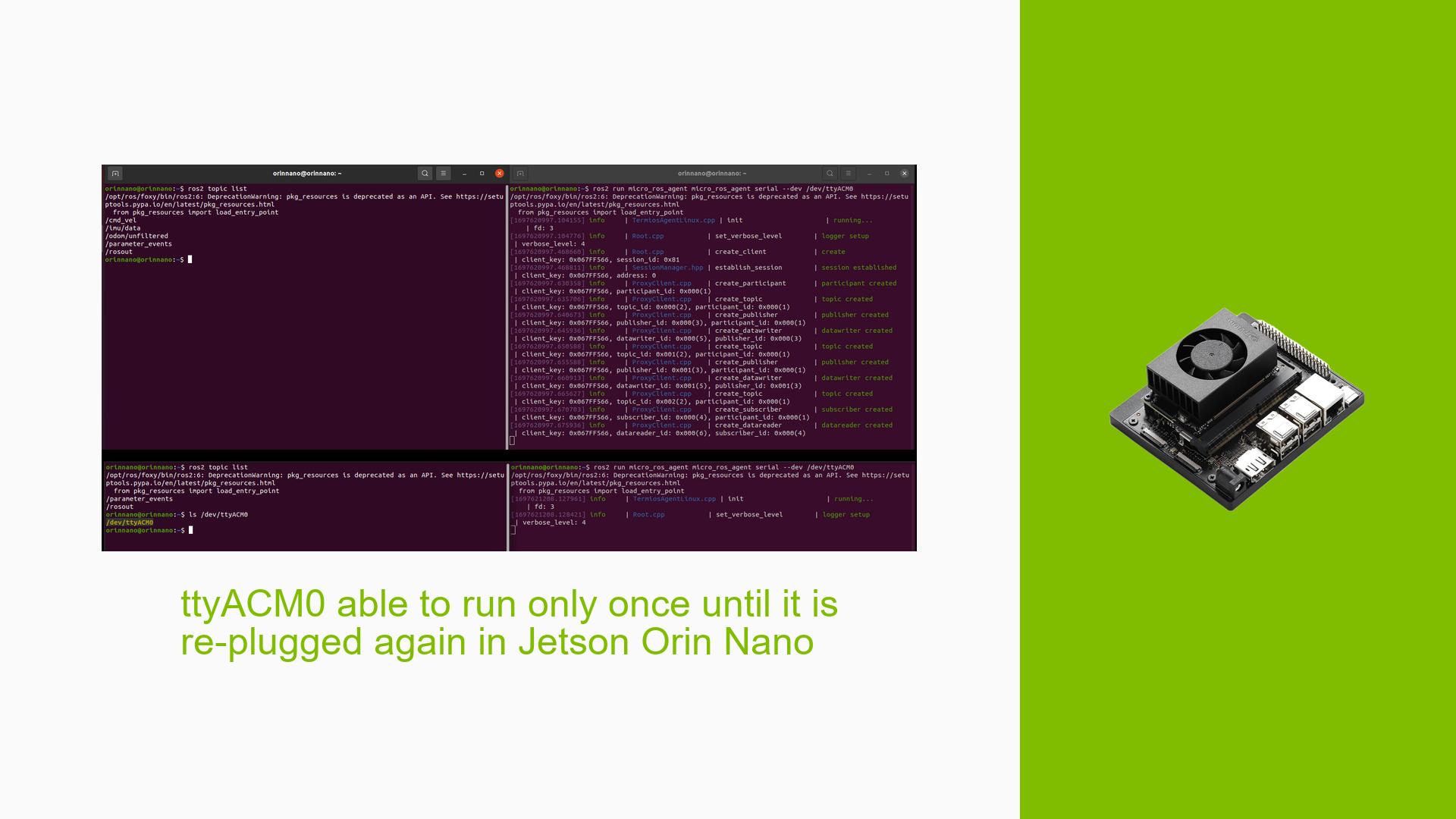
ttyACM0 able to run only once until it is re-plugged again in Jetson Orin Nano
Issue Overview
Users are experiencing an issue with the Nvidia Jetson Orin Nano Developer Kit where the microcontroller connected via the ttyACM0 port only operates successfully on the first attempt after being plugged in. Subsequent attempts to run the microcontroller require physically re-plugging the connection. This problem occurs specifically when using the "micro-ros" software to interface with a Teensy 3.2 microcontroller.
Symptoms and Context
- The microcontroller runs properly for the first time after being connected.
- On subsequent attempts, while the port ttyACM0 is detected, the microcontroller fails to execute.
- Users have noted that this issue does not occur on other platforms, such as a laptop running a different version of ROS 2 (Humble).
- The environment specifications include:
- Package: nvidia-jetpack
- Version: 5.1.2-b104
- Architecture: arm64
- OS: Ubuntu 20.04.6 LTS
- The issue has been consistently reported across multiple users, indicating a systemic problem rather than isolated incidents.
Impact
This issue significantly hampers user experience and functionality, as it disrupts development workflows and necessitates manual intervention to reset connections.
Possible Causes
-
Hardware Incompatibilities or Defects: The USB-A ports may not be fully compatible with the Teensy microcontroller, leading to communication failures.
-
Software Bugs or Conflicts: There could be bugs within the "micro-ros" package or conflicts with the Jetpack version being used.
-
Configuration Errors: Incorrect settings in either the microcontroller or Jetson Orin Nano could prevent proper communication.
-
Driver Issues: Outdated or incompatible USB drivers may cause intermittent connectivity problems.
-
Environmental Factors: Power supply issues or overheating could affect performance and stability.
-
User Errors or Misconfigurations: Improper setup of connections or software configurations might lead to this issue.
Troubleshooting Steps, Solutions & Fixes
-
Verify Connections:
- Ensure that the Teensy 3.2 is connected via Micro-USB to USB-A on the Jetson Orin Nano.
- Check that all cables and connectors are functioning properly.
-
Test Different Ports:
- Confirm if the issue persists across all USB-A ports on the Jetson Orin Nano.
- If available, test using a Type-C port instead of USB-A, as users have reported success with this configuration.
-
Run Diagnostic Commands:
- Execute commands to gather system information:
echo 'module usbcore +p' > /sys/kernel/debug/dynamic_debug/control echo 'module xhci_hcd +p' > /sys/kernel/debug/dynamic_debug/control sudo dmesg -n 8 sudo dmesg > dmesg.log - Analyze
dmesg.logfor any relevant error messages related to ttyACM0.
- Execute commands to gather system information:
-
Check for Software Updates:
- Ensure that both Jetpack and ROS packages are up-to-date. Consider upgrading to newer versions if available.
-
Use an External USB Hub:
- Connect an external USB hub to the Type-C port and then connect the Teensy through this hub. This workaround has shown positive results for some users.
-
Reflash SD Card:
- If issues persist, consider using a different SD card and re-flashing the Jetson Orin Nano using SDK Manager.
-
Monitor System Resources:
- Check for any EXT4 filesystem errors or other system resource issues that may be affecting performance.
-
Document Findings:
- If problems continue after these steps, document findings and share logs from
dmesgfor further analysis by support communities or forums.
- If problems continue after these steps, document findings and share logs from
-
Best Practices:
- Regularly update firmware and software packages.
- Maintain a clean power supply to avoid voltage drops or fluctuations.
- Ensure proper cooling mechanisms are in place to prevent overheating during extended use.
This structured approach should help users diagnose and potentially resolve issues related to running their microcontrollers on the Nvidia Jetson Orin Nano Developer Kit effectively.