
Troubleshooting CSI Camera Issues on Nvidia Jetson Orin Nano Custom Carrier Board
Issue Overview
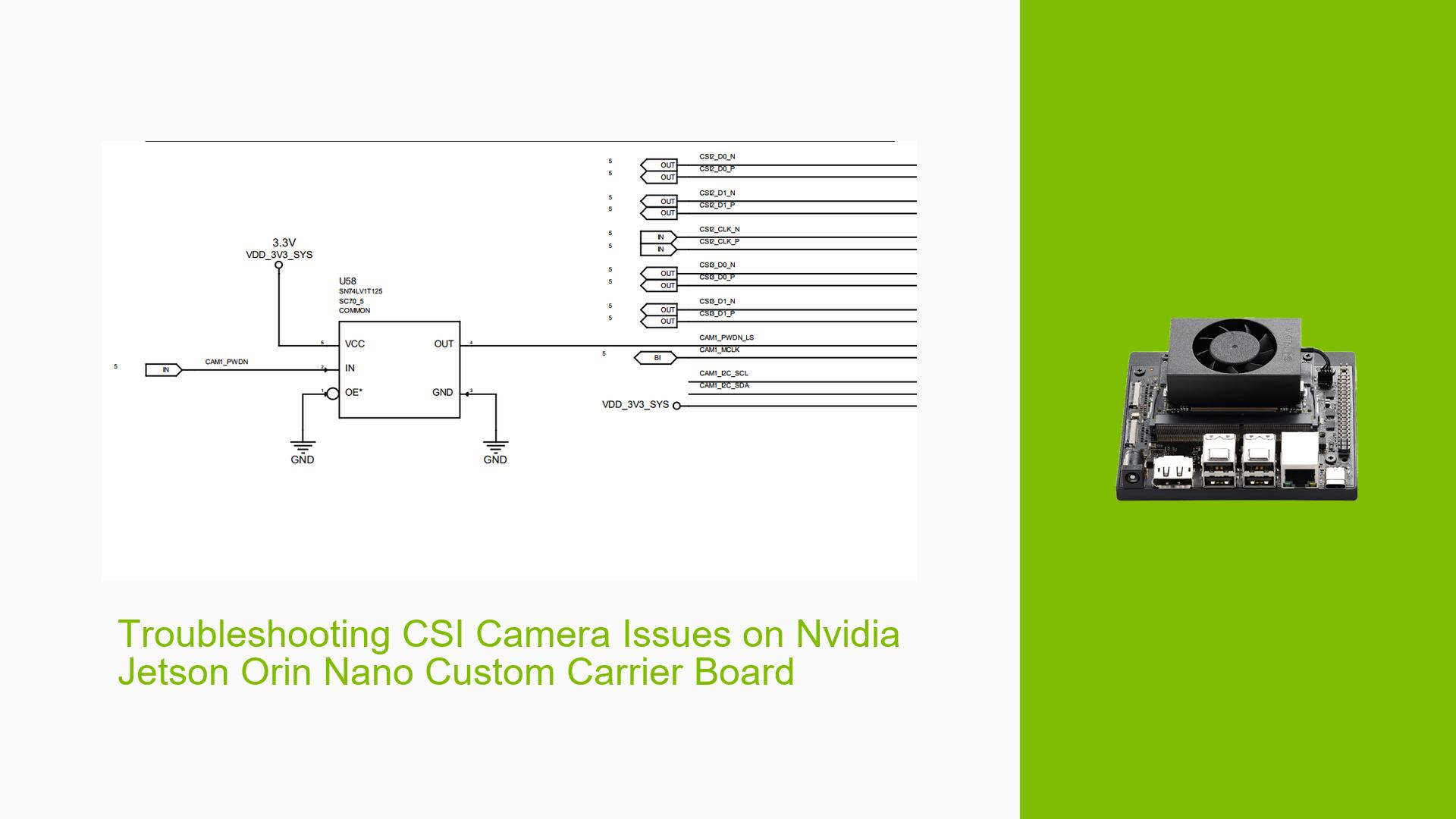
Users are experiencing problems with CSI cameras on custom carrier boards for the Nvidia Jetson Orin Nano 8GB. The main symptoms include:
- No video output or black screen when using an IMX219 camera
- Absence of clock signals from CSI0_CLK_N and CSI0_CLK_P pins
- Inconsistent behavior of the CAM_MUX_SEL pin during boot and camera operation
- Difficulty in capturing data from the camera sensor
These issues occur during the setup and testing of custom carrier boards, particularly when comparing functionality with the Jetson Orin developer kit. The problems impact the ability to use CSI cameras effectively on custom hardware designs.
Possible Causes
-
Hardware Design Discrepancies: Differences in the custom carrier board design compared to the reference developer kit may lead to signal integrity issues or improper connections.
-
Component Selection: Incorrect selection of passive components like pull-up resistors or TVS diodes can interfere with proper signal transmission.
-
Power Management: Improper power sequencing or voltage levels for camera modules may cause initialization failures.
-
Software Configuration: Incorrect device tree settings or camera driver configurations could prevent proper camera recognition and initialization.
-
Signal Integrity Issues: Noise or interference on the CSI lines, particularly clock signals, may disrupt camera communication.
-
Camera Module Compatibility: Potential incompatibilities between the specific camera module and the custom carrier board design.
Troubleshooting Steps, Solutions & Fixes
-
Verify Hardware Connections:
- Double-check all CSI connections, ensuring they match the reference design.
- Confirm that CAM0_PWDN and CAM1_PWDN are correctly connected and not shorted to power rails.
-
Adjust Pull-up Resistors and TVS Diodes:
- Review and adjust pull-up resistor values to match the reference design.
- Remove or replace TVS diodes on data lines, as they may be clipping signal voltages:
// Example resistor values (verify with reference design) R_PULLUP_CSI = 2.2k Ohm
-
Verify Power Supply:
- Ensure all voltage rails for the camera module are correct and stable.
- Check power sequencing matches the camera module’s requirements.
-
Software Configuration:
- Verify camera configuration in the device tree:
# Check current device tree dtc -I fs /sys/firmware/devicetree/base - Ensure the correct camera driver is loaded:
lsmod | grep camera
- Verify camera configuration in the device tree:
-
Test Camera Communication:
- Use v4l2-ctl to verify camera detection and capabilities:
v4l2-ctl --list-devices v4l2-ctl -d /dev/video0 --all - Attempt to capture data using v4l2-ctl:
v4l2-ctl --set-fmt-video=width=1920,height=1080,pixelformat=RG10 --set-ctrl bypass_mode=0 --stream-mmap
- Use v4l2-ctl to verify camera detection and capabilities:
-
Signal Integrity Checks:
- Use an oscilloscope to compare CSI signal quality between the custom board and developer kit.
- Pay special attention to clock signals (CSI0_CLK_N and CSI0_CLK_P).
-
Camera Module Testing:
- Test the camera module on the developer kit to ensure it’s functioning correctly.
- If possible, try a different camera module on the custom carrier board to isolate potential compatibility issues.
-
I2C Communication Check:
- Verify I2C communication with the camera module:
i2cdetect -y -r 0 # Replace 0 with the appropriate I2C bus number - If the camera is not detected, check I2C pull-up resistors and connections.
- Verify I2C communication with the camera module:
-
GPIO Debugging:
- Monitor the state of critical GPIOs like CAM_MUX_SEL:
gpioget $(gpiofind PCC.03) - Use gpioset to manually control GPIO states for testing.
- Monitor the state of critical GPIOs like CAM_MUX_SEL:
-
Thermal Considerations:
- Check operating temperatures, especially if issues occur after extended use.
- Ensure proper thermal management for the Jetson module and camera.
If problems persist after trying these steps, consider consulting with the camera module vendor for specific configuration requirements or potential compatibility issues with the Jetson Orin Nano platform.