
Jetson Orin Nano/NX Custom Carrier Board CSI Configuration Issues
Issue Overview
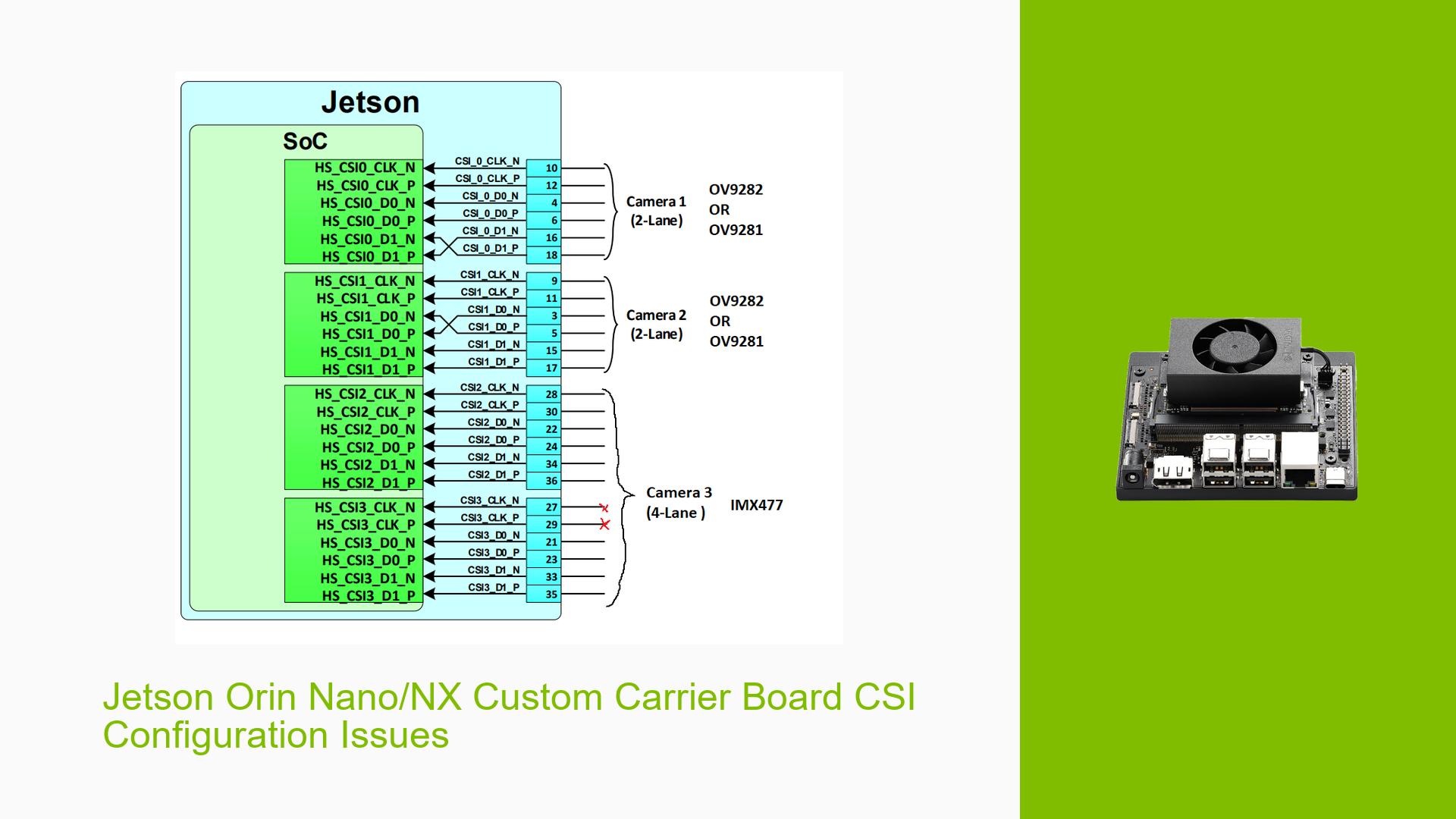
The discussion revolves around the design of a custom carrier board for the Nvidia Jetson Orin Nano and Orin NX platforms. Users are experiencing uncertainty regarding the compatibility of camera configurations, specifically the ability to mix different types of camera interfaces. The main symptoms include:
- Confusion about whether it is possible to use a combination of two 2-Lane cameras and one 4-Lane camera on the same carrier board.
- Concerns about the compatibility of specific camera sensors with the Nvidia Jetson software.
This issue arises during the planning phase of hardware design, particularly when configuring Camera Serial Interface (CSI) connections as per the product design guide. The product design guide indicates that configurations can either be two 4-Lane cameras or four 2-Lane cameras, but does not explicitly address mixed configurations.
The frequency of this issue seems to be common among users designing custom carrier boards, as they seek clarity on the specifications and limitations outlined in the documentation. The impact on user experience includes potential delays in development and uncertainty in hardware design choices.
Possible Causes
Several potential causes can lead to the confusion and issues experienced by users:
-
Hardware Incompatibilities: The mixing of camera types may not be supported by the hardware architecture, leading to potential failures in communication or functionality.
-
Software Bugs or Conflicts: There may be existing software limitations or bugs that affect how different camera configurations are recognized and utilized by the Jetson platform.
-
Configuration Errors: Incorrectly setting up the CSI connections could lead to non-functional setups or unexpected behavior.
-
Driver Issues: Outdated or incompatible drivers may prevent proper recognition or operation of mixed camera types.
-
User Misconfigurations: Users may not fully understand how to configure their custom boards according to Nvidia’s specifications, leading to errors in setup.
Troubleshooting Steps, Solutions & Fixes
To address these issues, users can follow these troubleshooting steps and solutions:
-
Review Product Design Guide:
- Carefully read through the Nvidia product design guide for Jetson Orin Nano/NX to understand supported camera configurations.
-
Test Configuration Compatibility:
- If possible, prototype your design with actual hardware. Connect two 2-Lane cameras and one 4-Lane camera to verify if they function together as intended.
-
Check Camera Sensor Compatibility:
- Ensure that the specific sensors you plan to use are compatible with Jetson software. Refer to Nvidia’s documentation for supported camera models and configurations.
-
Update Drivers and Software:
- Ensure that you are using the latest drivers for your Jetson board. Check Nvidia’s official website for any updates related to camera support.
-
Use Diagnostic Commands:
- Utilize terminal commands to gather information about connected devices:
v4l2-ctl --list-devices - This command will help identify whether all connected cameras are recognized by the system.
- Utilize terminal commands to gather information about connected devices:
-
Isolate Issues:
- If issues persist, try testing each camera individually on a known working configuration to isolate any faulty components.
-
Engage with Community Support:
- If uncertainties remain, consider reaching out on forums or Nvidia’s developer community for further assistance from other users who might have faced similar challenges.
-
Document Findings:
- Keep a record of your configuration attempts and results which can help in troubleshooting future issues or when seeking help from others.
-
Best Practices for Future Designs:
- When designing custom carrier boards, adhere strictly to Nvidia’s recommended configurations unless you have verified mixed configurations through testing.
By following these steps, users can effectively troubleshoot their custom carrier board designs for the Jetson Orin Nano/NX and ensure compatibility with their chosen camera setups.