
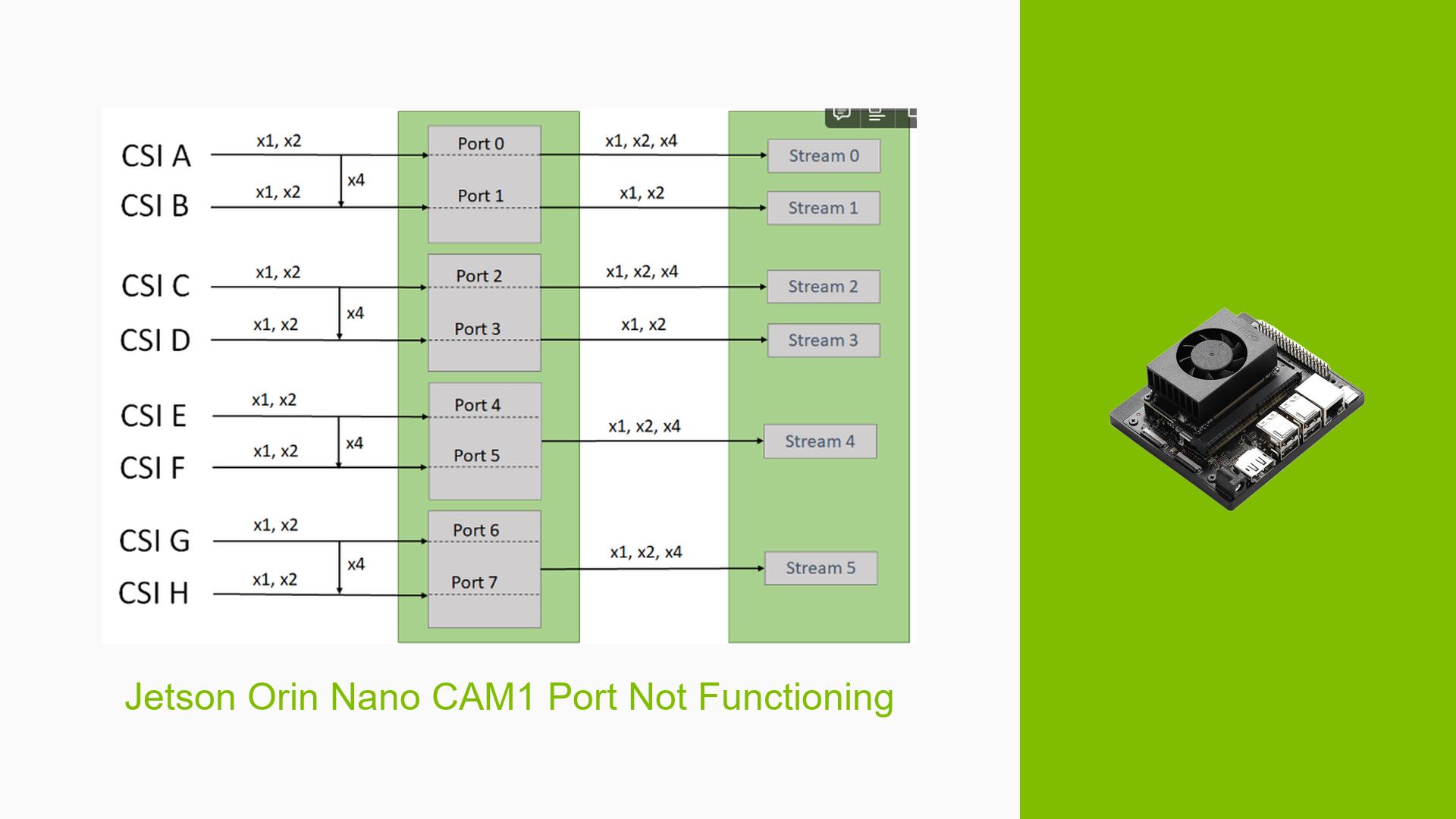
Jetson Orin Nano CAM1 Port Not Functioning
Issue Overview
Users of the Nvidia Jetson Orin Nano Dev board are experiencing issues with the CAM1 port not functioning while the CAM0 port operates normally. The symptoms include:
- CAM0 Port: Successfully connects and operates with camera kits.
- CAM1 Port: Fails to establish a connection when a camera kit is attached.
This problem arises specifically when users attempt to utilize the CAM1 port for cameras such as the Omnivision OV9782 sensor. The issue is frequently reported during setup and configuration phases, particularly when trying to enable or configure the CAM1 port to function similarly to CAM0.
Relevant hardware specifications include:
- Jetson Orin Nano Dev board
- Camera configurations using either CSI-B (for CAM1) or CSI-C (for CAM0).
The impact of this issue significantly affects user experience, as it limits the ability to utilize multiple cameras simultaneously, which is critical for various applications in robotics and AI.
Possible Causes
Several potential causes for the issue have been identified:
-
Hardware Incompatibilities: The physical connections or wiring may not support dual camera setups.
-
Software Bugs or Conflicts: There may be bugs in the driver software that prevent CAM1 from initializing correctly.
-
Configuration Errors: Incorrect settings in the device tree properties, particularly related to lane polarity and port indices, could lead to improper functioning of CAM1.
-
Driver Issues: The camera driver may not fully support the specific camera model being used with CAM1.
-
Environmental Factors: Power supply issues or overheating could affect performance.
-
User Errors: Misconfigurations in device tree settings or incorrect wiring of the camera could result in failure to detect CAM1.
Each of these causes can lead to an inability to activate or use the CAM1 port effectively.
Troubleshooting Steps, Solutions & Fixes
To address the issue with CAM1 on the Jetson Orin Nano, follow these comprehensive troubleshooting steps:
-
Verify Camera Connections:
- Ensure that the camera is properly connected to the CAM1 port.
- Check for any physical damage or loose connections.
-
Check Device Tree Configuration:
- Access and review the device tree source files related to camera configuration.
- Confirm that
lane_polaritysettings are correct:- For CAM0 (CSI-C):
lane_polarity = "6"(indicating a polarity swap). - For CAM1 (CSI-B):
lane_polarity = "0"(no polarity swap).
- For CAM0 (CSI-C):
Example configuration snippet:
mode0 { mclk_khz = "24000"; num_lanes = "2"; tegra_sinterface = "serial_b"; // For CAM1 lane_polarity = "0"; // Ensure this is set correctly } -
Modify Port Index Settings:
- Ensure that
port-indexis set correctly according to your hardware connections:- Use
port-index=<2>for serial_c (CAM0). - Use
port-index=<1>for serial_b (CAM1).
- Use
- Ensure that
-
Patch Driver Source Code:
- If modifications are necessary, apply patches carefully following instructions from reliable sources.
- Use Git commands for applying patches if you have access to kernel sources.
-
Recompile Kernel Sources:
- After making changes, recompile your kernel sources as per Nvidia’s guidelines.
- Ensure you are using the latest JetPack version compatible with your Jetson board.
-
Test with Different Cameras:
- If possible, test with another compatible camera model to rule out hardware issues with the current camera.
-
Monitor System Logs:
- Use terminal commands like
dmesgorjournalctlto check for error messages related to camera initialization.
- Use terminal commands like
-
Best Practices:
- Regularly update drivers and firmware for compatibility improvements.
- Follow Nvidia’s documentation closely when configuring hardware settings.
-
Seek Community Support:
- If issues persist, consider reaching out on forums or Nvidia developer resources for additional insights and support from experienced users.
-
Unresolved Aspects:
- Further investigation may be required if errors persist after following these steps, particularly concerning driver validation and compatibility with specific camera models.
By following these steps, users should be able to diagnose and potentially resolve issues related to activating and using the CAM1 port on their Jetson Orin Nano Dev board effectively.